作者单位:Intel Labs
https://arxiv.org/abs/2103.13413
https://github.com/isl-org/DPT
密集预测视觉Transformer(DPT),其在单目深度估计、语义分割等任务上表现SOTA!
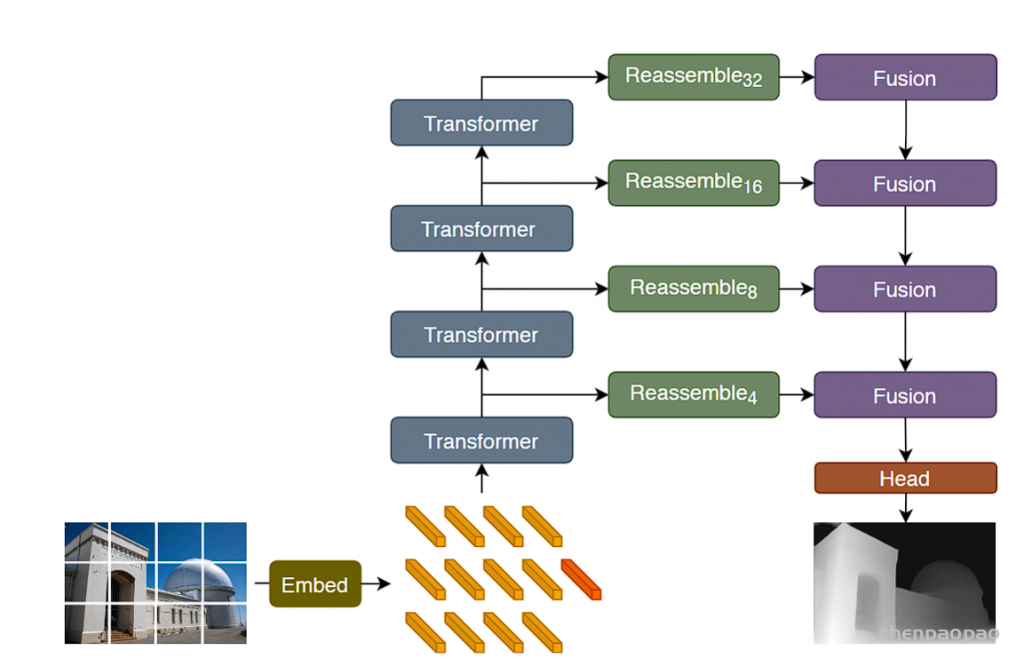
我们介绍了密集视觉Transformer,该架构利用视觉Transformer代替卷积网络作为密集预测任务的骨干。我们将视觉Transformer各个阶段的token组装成各种分辨率的图像表示形式,并使用卷积解码器将它们逐步组合为全分辨率预测。
Transformer主干以恒定且相对较高的分辨率处理表示,并且在每个阶段都具有全局感受野。与全卷积网络相比,这些特性使密集视觉Transformer可以提供更细粒度和更全局一致的预测。
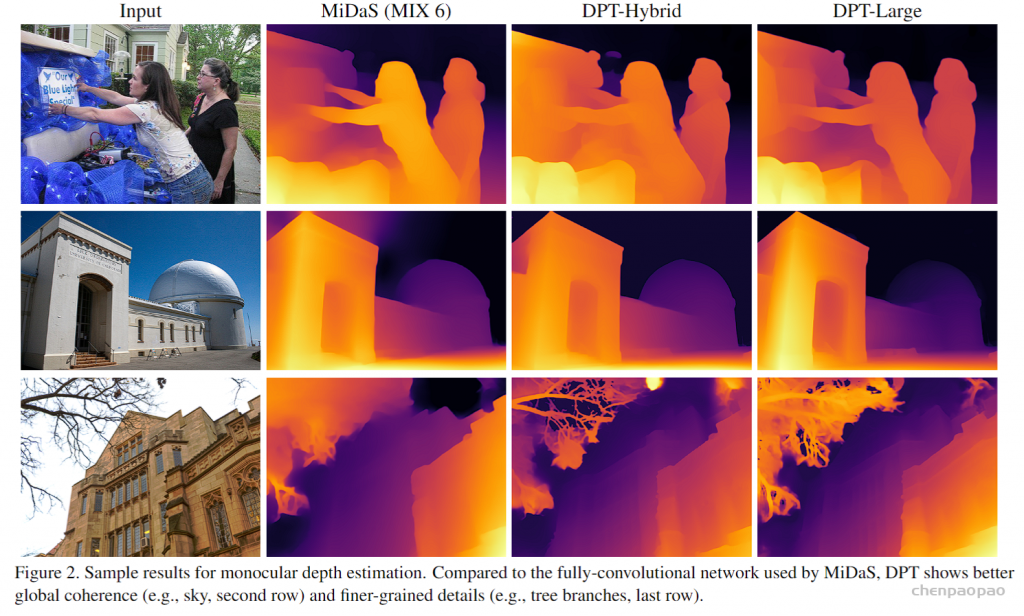
实验表明,这种架构在密集的预测任务上产生了实质性的改进,特别是当有大量的训练数据可用时。对于单眼深度估计,与最先进的完全卷积网络(FCN,fully-convolutional networks.)相比,其相对性能提高了高达28%。应用于语义分割时,Dense vision transformer在ADE20K上是49.02%的mIoU。同时进一步表明,当处于新技术设置,该架构可以在较小的数据集上进行微调,如NYUv2、KITTI和Pascal Context。
Introduction
密集预测架构主要基于卷积网络,其设计通常遵循一种从逻辑上将网络分为编码器和解码器的模式。编码器通常基于一个图像分类网络(主干),在像ImageNet这样的大型语料库上进行预训练。解码器聚合来自编码器的特征,并将其转换为最终的密集预测。密集预测的体系结构研究往往集中在解码器及其聚合策略上。主干架构对整个模型有很大的影响,因为编码器中丢失的任何信息都不可能在解码器中恢复。
卷积主干逐步对输入图像进行向下采样,以提取多个尺度上的特征。下采样使接受域的逐渐增加,将低级特征分组为抽象的高级特征,同时确保网络的内存和计算需求保持易于处理。然而,下采样有明显的缺点,这在密集的预测任务中特别突出:特征分辨率和粒度在模型的更深层次的阶段丢失,因此很难在解码器中恢复。虽然特征分辨率和粒度可能对某些任务并不重要,如图像分类,但它们对于密集预测至关重要,在理想情况下,体系结构应该能够在或接近输入图像的分辨率时分辨特征。
现提出的减轻特征粒度损失的各种技术。这些包括训练在更高的输入分辨率(如果计算预算允许),扩大卷积,迅速增加接受域没有下采样,适当放置从编码器的多个阶段跳过连接到解码器,或者最近的通过在整个网络并行连接多分辨率表示。虽然这些技术可以显着提高预测质量,但网络仍然受到其基本构建块—卷积的瓶颈。卷积和非线性一起构成了图像分析网络的基本计算单元。根据定义,卷积是具有有限接受域的线性算子。有限的接受域和单个卷积的有限表达性需要顺序堆叠成非常深的结构,以获得非常广泛的背景和足够高的表征能力。 然而,这需要产生许多需要大量的间接表示。降采样中间表示是必要的,以保持内存消耗在现有计算机架构中可行的水平。
在本工作中,介绍了密集的预测变压器(DPT)。DPT是一种密集的预测体系结构,它基于编码器-解码器的设计,利用transformer作为编码器的基本计算构建块。具体来说,使用最近提出的Vision Transformer(ViT)作为主干架构,将ViT提供的bag-of-words表示重新组装为不同分辨率的类图像特征表示,并使用卷积解码器逐步将特征表示组合到最终的密集预测中。与完全卷积网络不同,ViT主干在计算初始图像嵌入后放弃显式下采样操作,并在所有处理阶段保持恒定维度的表示。此外,在每个阶段都有一个全局性的接受域,实验表明,这些特性对于密集的预测任务特别有利,因为它们会导致细粒度和全局相一致的预测。
单眼深度估计和语义分割的实验。对于通用单眼深度估计的任务,其中有大规模的训练数据可用,与该任务中性能最好的全卷积网络相比,DPT提供的性能提高了超过28%。该架构还可以微调到小的单眼深度预测数据集,如NYUv2和KITTI,当它也设置了新的技术状态。实验利用语义分割实验进一步提供了DPT的强性能的证据。对于这个任务,DPT在具有挑战性的ADE20K和Pascal Context数据集上设置了一个新的最新技术状态。定性结果表明,与卷积网络相比,这些改进可以归因于更细粒度和更全局一致的预测。
Transformer encoder
在一个高水平上,Vision Transformer在图像的bag-of-words表示上进行操作。单独嵌入到特征空间中的图像补丁,或者从图像中提取的深度特征,扮演“words”的角色。在本工作的其余部分中,将嵌入的“word”称为tokens 。Transformer使用multi-headed self-attention(MHSA)的顺序块对tokens进行转换,该块将tokens相互联系起来来转换表示。
image–extracted–image patch–word–token(变化):特征空间中的图像patch
image patch:图像补丁是较大形式的像素容器例如,假设有一张 100 像素 x 100 像素的图像。如果您将这些图像划分为 10×10 块,那么将拥有一个包含 100 个块的图像(即每个块为 100 像素)。如果开发了一种算法,可以在 10px x 10px 上运行,那么 10px x 10px 就是补丁大小。例如,CNN 的池化层采用更大的块并将它们变成一个像素,可以将其视为信号处理中的窗口。在图像处理补丁和窗口大多数情况下是可以互换的,但是当您的算法主要关注一堆像素共享相似属性的事实时,通常会在上下文中使用补丁。例如,补丁用于稀疏表示或图像压缩的上下文,而窗口用于边缘检测或图像增强。
Multi-headed self-attention(MHSA) Net:一种新的人物再识别模型,称为多头自我注意网络(MHSA-Net),用于从人物图像中剔除不重要的信息并捕捉关键的局部信息。MHSA-Net包含两个主要的新颖组件:多头自我注意分支(MHSAB)和注意力竞争机制(ACM)。MHSAM自适应地捕获关键的局域人信息,然后产生有效的图像多样性嵌入,用于人的匹配。ACM进一步帮助过滤剔除注意力、噪音和非关键信息。通过广泛的消融研究,验证了结构化的自我注意分支和注意竞争机制都有助于MHSA-Net的性能提高。MHSA-Net在有遮挡的图像上作用深远。
对于应用程序来说,重要的是,transformer在所有计算过程中保持token数量。由于token与image patches有一对一的对应关系,这意味着ViT编码器在所有transformer阶段保持初始嵌入的空间分辨率。此外,MHSA是一个全局操作,因为每个token都可以关注并影响其他token。因此,transformer在初始嵌入后的每个阶段都有一个全局的接受域。这与卷积网络形成了鲜明的对比,卷积网络随着特征通过连续的卷积和下采样层时,逐渐增加了它们的接受域。
具体而言,ViT通过处理所有不重叠的正方形斑块从图像中提取嵌入的补丁从图像中获得像素的大小。这些补丁被扁平(flattened into)到向量中,并使用线性投影单独嵌入。另一种,更具样本效率的ViT变体通过对图像应用ResNet50来提取嵌入,并使用生成的特征映射的像素特征作为标记。由于transformer是set-to-set functions,因此它们本质上并不保留单个token的空间位置信息。因此,图像嵌入与可学习的位置嵌入连接,以将这些信息添加到表示中。在NLP中的工作之后,ViT还添加了一个与输入图像不相关的special token(readout token),并作为最终用于分类的全局图像表示。在此将这个特殊的标记称为读出标记。
Convolutional decoder
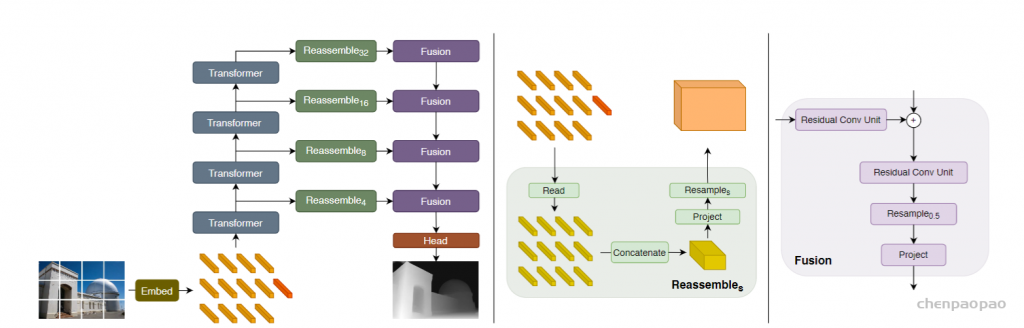
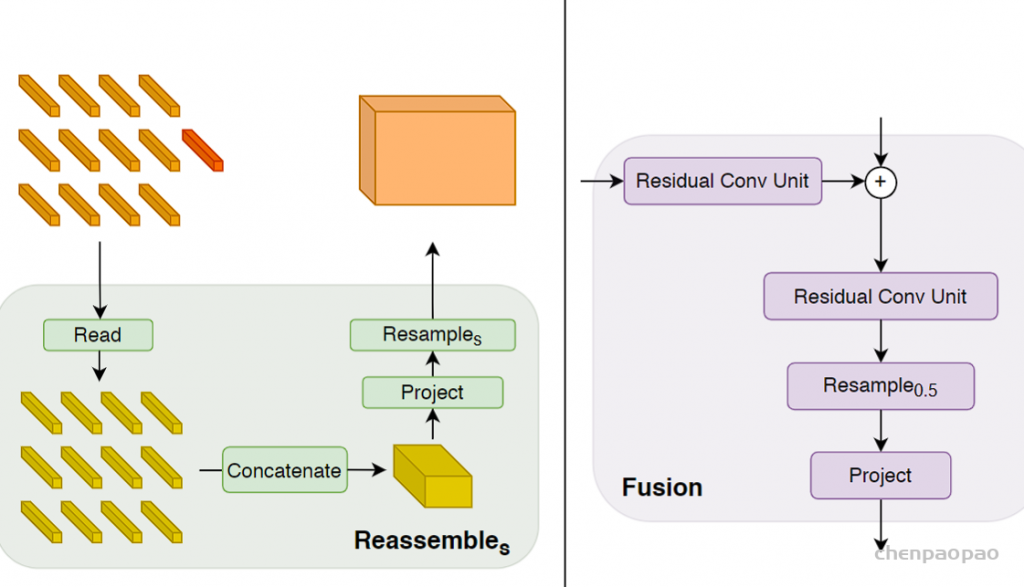
解码器将tokens组合成不同分辨率的类图像特征表示。特征表示逐渐融合到最终的密集预测中。文章提出了一个简单的三阶段重组操作,以从transformer encoder任意层输出的token中恢复类图像的表示形式
不管具体的transformer主干如何,都在四个不同的阶段和四个不同的分辨率上重新组装特征。以更低分辨率组装transformer深层的特征,而早期层的特征以更高分辨率组装。当使用ViT-Large时,从 l ={5,12,18,24}层重新组装tokens,而使用ViT-Base,使用 l ={3,6,9,12}层。当使用ViT-Hybrid时,使用了来自嵌入网络的第一和第二个ResNet块和阶段 l ={9,12}的特性。默认体系结构使用投影作为读出操作,并使用=256维度生成特性映射,将这些架构分别称为DPT-Base、DPT-Large和DPTHybrid。
最后,使用基于RefineNet的特征融合块结合从连续阶段提取的特征图,并在每个融合阶段对表示向上采样两次。最终的表示大小的分辨率是输入图像的一半,在此,附加一个特定于任务的输出头来产生最终的预测。完整架构的示意图概述如上图所示。