Multi-Scale Context Aggregation by Dilated Convolutions
一个简单的例子,[动态图来源:vdumoulin/conv_arithmetic]:
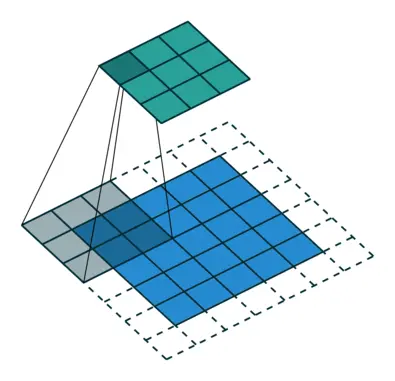
对于 dilated convolution, 我们已经可以发现他的优点,即内部数据结构的保留和避免使用 down-sampling 这样的特性。但是完全基于 dilated convolution 的结构如何设计则是一个新的问题。
潜在问题 1:The Gridding Effect
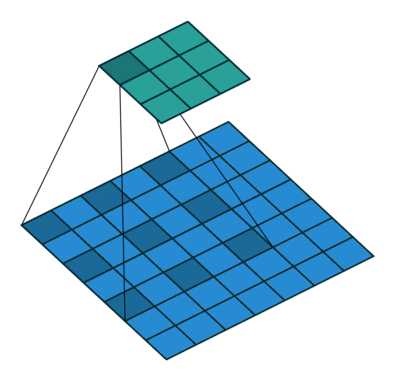
假设我们仅仅多次叠加 dilation rate 2 的 3 x 3 kernel 的话,则会出现这个问题:

我们发现我们的 kernel 并不连续,也就是并不是所有的 pixel 都用来计算了,因此这里将信息看做 checker-board 的方式会损失信息的连续性。这对 pixel-level dense prediction 的任务来说是致命的。
潜在问题 2:Long-ranged information might be not relevant.
我们从 dilated convolution 的设计背景来看就能推测出这样的设计是用来获取 long-ranged information。然而光采用大 dilation rate 的信息或许只对一些大物体分割有效果,而对小物体来说可能则有弊无利了。如何同时处理不同大小的物体的关系,则是设计好 dilated convolution 网络的关键。
通向标准化设计:Hybrid Dilated Convolution (HDC)
对于上个 section 里提到的几个问题,图森组的文章对其提出了较好的解决的方法。他们设计了一个称之为 HDC 的设计结构。
第一个特性是,叠加卷积的 dilation rate 不能有大于1的公约数。比如 [2, 4, 6] 则不是一个好的三层卷积,依然会出现 gridding effect。
第二个特性是,我们将 dilation rate 设计成 锯齿状结构,例如 [1, 2, 5, 1, 2, 5] 循环结构。
第三个特性是,我们需要满足一下这个式子: Mi=max[Mi+1−2ri,Mi+1−2(Mi+1−ri),ri]
其中 ri 是 i 层的 dilation rate 而 Mi 是指在 i 层的最大dilation rate,那么假设总共有n层的话,默认 Mn=rn 。假设我们应用于 kernel 为 k x k 的话,我们的目标则是 M2≤k ,这样我们至少可以用 dilation rate 1 即 standard convolution 的方式来覆盖掉所有洞。
一个简单的例子: dilation rate [1, 2, 5] with 3 x 3 kernel (可行的方案)

而这样的锯齿状本身的性质就比较好的来同时满足小物体大物体的分割要求(小 dilation rate 来关心近距离信息,大 dilation rate 来关心远距离信息)。
这样我们的卷积依然是连续的也就依然能满足VGG组观察的结论,大卷积是由小卷积的 regularisation 的 叠加。
代码:(绘制空洞卷积)
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.colors import LinearSegmentedColormap
def dilated_conv_one_pixel(center: (int, int),feature_map: np.ndarray,k: int = 3,r: int = 1,v: int = 1):
"""
膨胀卷积核中心在指定坐标center处时,统计哪些像素被利用到,
并在利用到的像素位置处加上增量v
Args:
center: 膨胀卷积核中心的坐标
feature_map: 记录每个像素使用次数的特征图
k: 膨胀卷积核的kernel大小
r: 膨胀卷积的dilation rate
v: 使用次数增量
"""
assert divmod(3, 2)[1] == 1
# left-top: (x, y)
left_top = (center[0] - ((k - 1) // 2) * r, center[1] - ((k - 1) // 2) * r)
for i in range(k):
for j in range(k):
feature_map[left_top[1] + i * r][left_top[0] + j * r] += v
def dilated_conv_all_map(dilated_map: np.ndarray,
k: int = 3,
r: int = 1):
"""
根据输出特征矩阵中哪些像素被使用以及使用次数,
配合膨胀卷积k和r计算输入特征矩阵哪些像素被使用以及使用次数
Args:
dilated_map: 记录输出特征矩阵中每个像素被使用次数的特征图
k: 膨胀卷积核的kernel大小
r: 膨胀卷积的dilation rate
"""
new_map = np.zeros_like(dilated_map)
for i in range(dilated_map.shape[0]):
for j in range(dilated_map.shape[1]):
if dilated_map[i][j] > 0:
dilated_conv_one_pixel((j, i), new_map, k=k, r=r, v=dilated_map[i][j])
return new_map
def plot_map(matrix: np.ndarray):
plt.figure()
c_list = ['white', 'blue', 'red']
new_cmp = LinearSegmentedColormap.from_list('chaos', c_list)
plt.imshow(matrix, cmap=new_cmp)
ax = plt.gca()
ax.set_xticks(np.arange(-0.5, matrix.shape[1], 1), minor=True)
ax.set_yticks(np.arange(-0.5, matrix.shape[0], 1), minor=True)
# 显示color bar
plt.colorbar()
# 在图中标注数量
thresh = 5
for x in range(matrix.shape[1]):
for y in range(matrix.shape[0]):
# 注意这里的matrix[y, x]不是matrix[x, y]
info = int(matrix[y, x])
ax.text(x, y, info,
verticalalignment='center',
horizontalalignment='center',
color="white" if info > thresh else "black")
ax.grid(which='minor', color='black', linestyle='-', linewidth=1.5)
plt.show()
plt.close()
def main():
# bottom to top
dilated_rates = [1, 2, 3]
# init feature map
size = 31
m = np.zeros(shape=(size, size), dtype=np.int32)
center = size // 2
m[center][center] = 1
# print(m)
# plot_map(m)
for index, dilated_r in enumerate(dilated_rates[::-1]):
new_map = dilated_conv_all_map(m, r=dilated_r)
m = new_map
print(m)
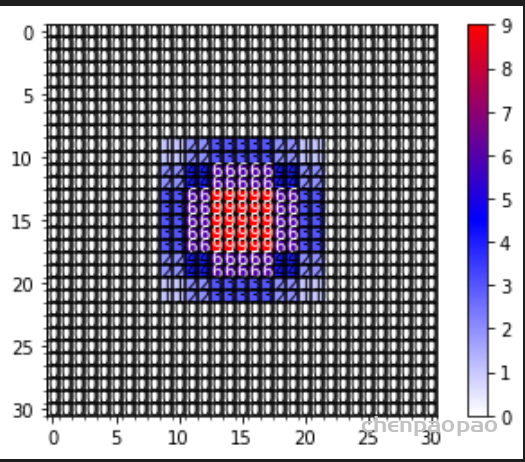
plot_map(m)
绘制结果: