Diffusion Models: A Comprehensive Survey of Methods and Applications来自加州大学&Google Research的Ming-Hsuan Yang、北京大学崔斌实验室以及CMU、UCLA、蒙特利尔Mila研究院等众研究团队,首次对现有的扩散生成模型(diffusion model)进行了全面的总结分析,从diffusion model算法细化分类、和其他五大生成模型的关联以及在七大领域中的应用等方面展开,最后提出了diffusion model的现有limitation和未来的发展方向。
论文:https://arxiv.org/abs/2209.00796
摘自:AI科技评论
github链接:https://github.com/YangLing0818/Diffusion-Models-Papers-Survey-Taxonomy(扩散模型论文汇总)
介绍
扩散模型(diffusion models)是深度生成模型中新的SOTA。扩散模型在图片生成任务中超越了原SOTA:GAN,并且在诸多应用领域都有出色的表现,如计算机视觉,NLP、波形信号处理、多模态建模、分子图建模、时间序列建模、对抗性净化等。此外,扩散模型与其他研究领域有着密切的联系,如稳健学习、表示学习、强化学习。然而,原始的扩散模型也有缺点,它的采样速度慢,通常需要数千个评估步骤才能抽取一个样本;它的最大似然估计无法和基于似然的模型相比;它泛化到各种数据类型的能力较差。如今很多研究已经从实际应用的角度解决上述限制做出了许多努力,或从理论角度对模型能力进行了分析。然而,现在缺乏对扩散模型从算法到应用的最新进展的系统回顾。为了反映这一快速发展领域的进展,我们对扩散模型进行了首个全面综述。我们设想我们的工作将阐明扩散模型的设计考虑和先进方法,展示其在不同领域的应用,并指出未来的研究方向。此综述的概要如下图所示:
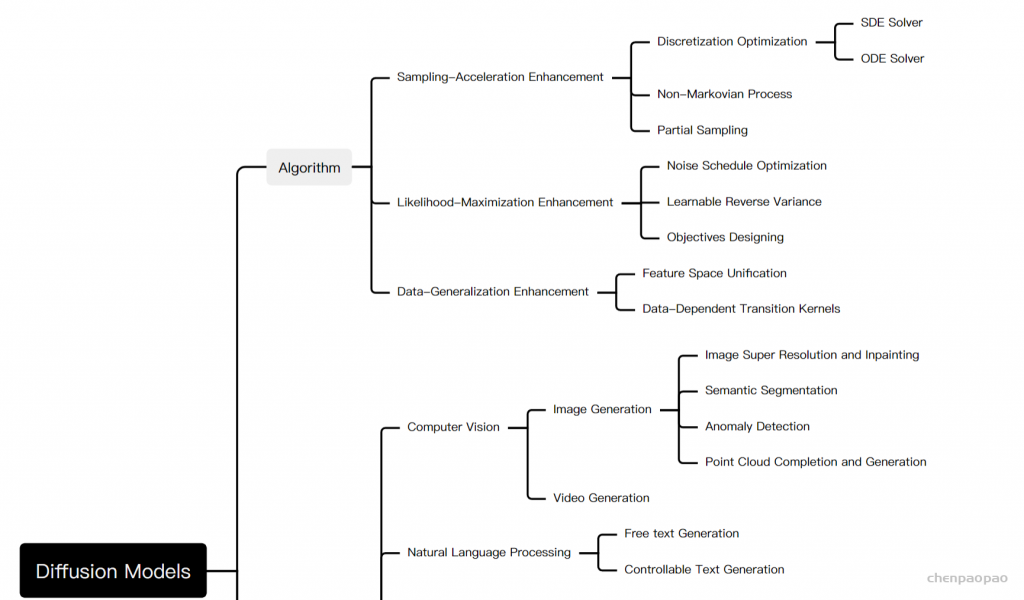
尽管diffusion model在各类任务中都有着优秀的表现,它仍还有自己的缺点,并有诸多研究对diffusion model进行了改善。为了系统地阐明diffusion model的研究进展,我们总结了原始扩散模型的三个主要缺点,采样速度慢,最大化似然差、数据泛化能力弱,并提出将的diffusion models改进研究分为对应的三类:采样速度提升、最大似然增强和数据泛化增强。我们首先说明改善的动机,再根据方法的特性将每个改进方向的研究进一步细化分类,从而清楚的展现方法之间的联系与区别。在此我们仅选取部分重要方法为例, 我们的工作中对每类方法都做了详细的介绍,内容如图所示:
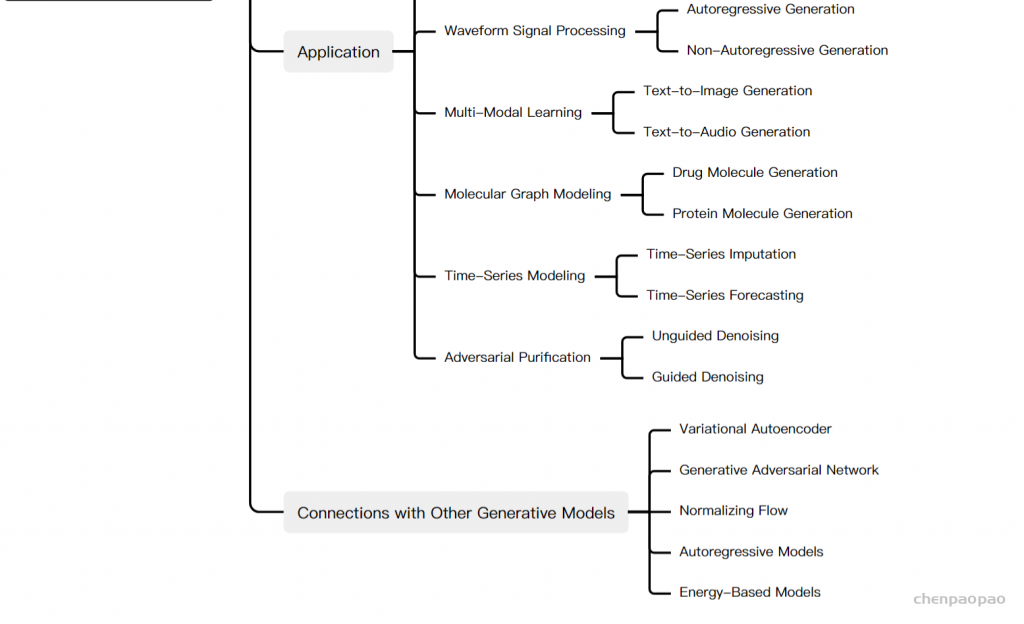
在分析完三类扩散模型后,我们将介绍其他的五种生成模型GAN,VAE,Autoregressive model, Normalizing flow, Energy-based model。考虑到扩散模型的优良性质,研究者们已经根据其特性将diffusion model与其他生成模型结合,所以为了进一步展现diffusion model 的特点和改进工作,我们详细地介绍了diffusion model和其他生成模型的结合的工作并阐明了在原始生成模型上的改进之处。Diffusion model在诸多领域都有着优异的表现,并且考虑到不同领域的应用中diffusion model产生了不同的变形,我们系统地介绍了diffusion model的应用研究,其中包含如下领域:计算机视觉,NLP、波形信号处理、多模态建模、分子图建模、时间序列建模、对抗性净化。对于每个任务,我们定义了该任务并介绍利用扩散模型处理任务的工作,我们将本项工作的主要贡献总结如下:
- 新的分类方法:我们对扩散模型和其应用提出了一种新的、系统的分类法。具体的我们将模型分为三类:采样速度增强、最大似然估计增强、数据泛化增强。进一步地,我们将扩散模型的应用分为七类:计算机视觉,NLP、波形信号处理、多模态建模、分子图建模、时间序列建模、对抗性净化。
- 全面的回顾:我们首次全面地概述了现代扩散模型及其应用。我们展示了每种扩散模型的主要改进,和原始模型进行了必要的比较,并总结了相应的论文。对于扩散模型的每种类型的应用,我们展示了扩散模型要解决的主要问题,并说明它们如何解决这些问题。
- 未来研究方向:我们对未来研究提出了开放型问题,并对扩散模型在算法和应用方面的未来发展提供了一些建议。
扩散模型基础
生成式建模的一个核心问题是模型的灵活性和可计算性之间的权衡。扩散模型的基本思想是正向扩散过程来系统地扰动数据中的分布,然后通过学习反向扩散过程恢复数据的分布,这样就了产生一个高度灵活且易于计算的生成模型。
1.Denoising Diffusion Probabilistic Models(DDPM)
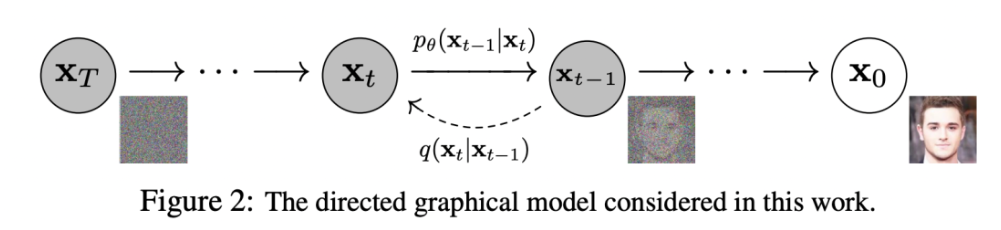
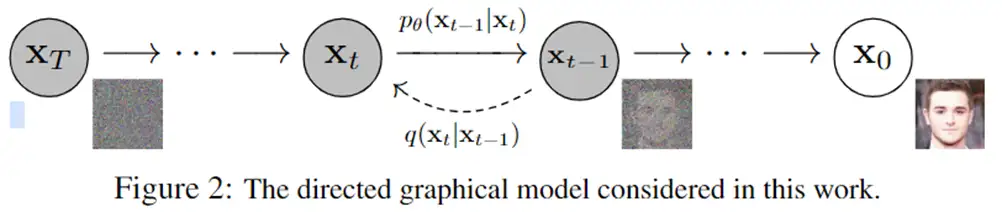
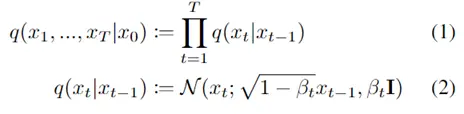
一个DDPM由两个参数化马尔可夫链组成,并使用变分推断以在有限时间后生成与原始数据分布一致的样本。前向链的作用是扰动数据,它根据预先设计的噪声进度向数据逐渐加入高斯噪声,直到数据的分布趋于先验分布,即标准高斯分布。反向链从给定的先验开始并使用参数化的高斯转换核,学习逐步恢复原数据分布。用表示原始数据及其分布,则前向链的分布是可由下式表达:
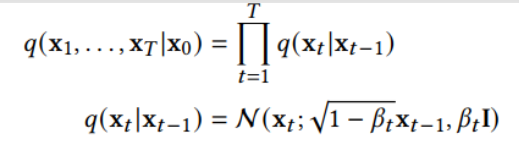
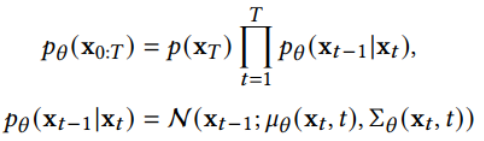
这说明前向链是马尔可夫过程,是加入t步噪音后的样本,是事先给定的控制噪声进度的参数。当 趋于1时,可以近似认为服从标准高斯分布。当很小时,逆向过程的转移核可以近似认为也是高斯的:
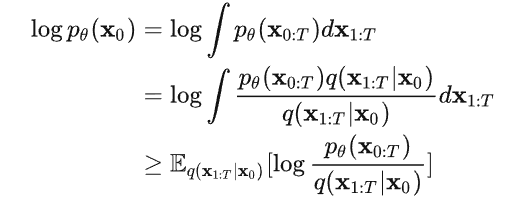
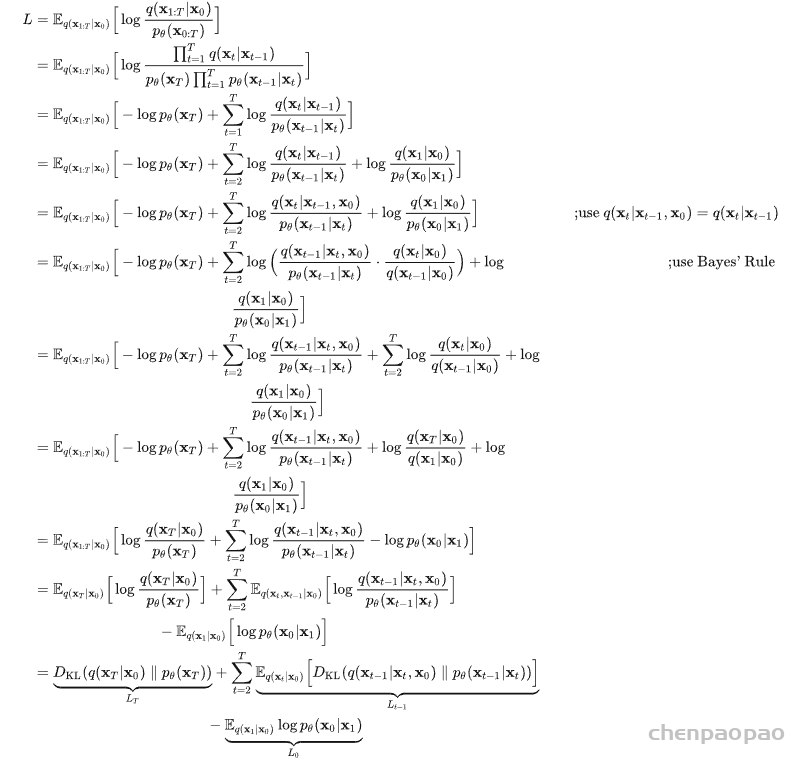
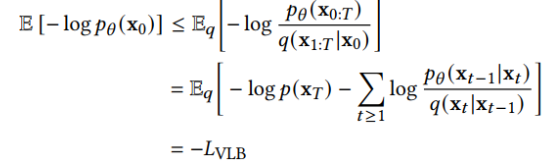
我们可以将变分下界作为损失函数进行学习:
2.Score-Based Generative Models(SGM)
上述DDPM可以视作SGM的离散形式。SGM构造一个随机微分方程(SDE)来平滑的扰乱数据分布,将原始数据分布转化到已知的先验分布:

和一个相应的逆向SDE,来将先验分布变换回原始数据分布:

因此,要逆转扩散过程并生成数据,我们需要的唯一信息就是在每个时间点的分数函数。利用score-matching的技巧我们可以通过如下损失函数来学习分数函数:

对两种方法的进一步介绍和两者关系的介绍请参见我们的文章。原始扩散模型的三个主要缺点,采样速度慢,最大化似然差、数据泛化能力弱。最近许多研究都在解决这些缺点,因此我们将改进的扩散模型分为三类:采样速度提升、最大似然增强和数据泛化增强。在接下来的三、四、五节我们将对这三类模型进行详细的介绍。
采样加速方法
在应用时,为了让新样本的质量达到最佳,扩散模型往往需要进行成千上万步计算来获取一个新样本。这限制了diffusion model的实际应用价值,因为在实际应用时,我们往往需要产生大量的新样本,来为下一步处理提供材料。研究者们在提高diffusion model采样速度上进行了大量的研究。我们对这些研究进行了详细的阐述。我们将其细化分类为三种方法:Discretization Optimization,Non-Markovian Process,Partial Sampling。
1.Discretization Optimization
方法优化求解diffusion SDE的方法。因为现实中求解复杂SDE只能使用离散解来逼近真正的解,所以该类方法试图优化SDE的离散化方法,在保证样本质量的同时减少离散步数。SGM 提出了一个通用的方法来求解逆向过程,即对前向和后向过程采取相同的离散方法。如果给定了前向SDE的离散方式:

那么我们就可以以相同的方式离散化逆向SDE:

这种方法比朴素DDPM效果略好一点。进一步,SGM向SDE求解器中加入了一个矫正器,从而让每一步生成的样本都有正确的分布。在求解的每一步,求解器给出一个样本后,矫正器都使用马尔可夫链蒙特卡罗方法来矫正刚生成的样本的分布。实验表明向求解器中加入矫正器比直接增加求解器的步数效率更高。
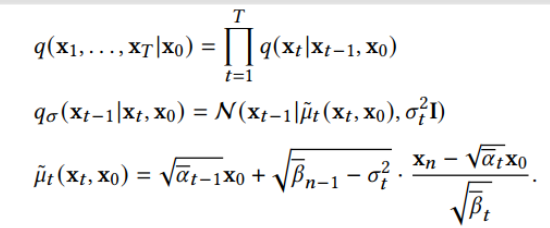
2.Non-Markovian Process方法突破了原有Markovian Process的限制,其逆过程的每一步可以依赖更多以往的样本来进行预测新样本,所以在步长较大时也能做出较好的预测,从而加速采样过程。其中主要的工作DDIM,不再假设前向过程是马尔可夫过程,而是服从如下分布:
DDIM的采样过程可以视为离散化的神经常微分方程,其采样过程更高效,并且支持样本的内插。进一步的研究发现DDIM可以视作流形上扩散模型PNDM的特例。3.Partial Sampling方法通过在generation process中忽略一部分的时间节点,而只使用剩下的时间节点来生成样本,直接减少了采样时间。例如,Progressive Distillation从训练好的扩散模型中蒸馏出效率更高的扩散模型。对于训练好的一个扩散模型,Progressive Distillation会从新训练一个扩散模型,使新的扩散模型的一步对应于训练好的扩散模型的两步,这样新模型就可以省去老模型一半的采样过程。具体算法如下:

不断循环这个蒸馏过程就能让采样步骤指数级下降。
最大似然估计加强
扩散模型在最大似然估计的表现差于基于似然函数的生成模型,但最大化似然估计在诸多应用场景都有重要意义,比如图片压缩, 半监督学习, 对抗性净化。由于对数似然难以直接计算,研究主要集中在优化和分析变分下界(VLB)。我们对提高扩散模型最大似然估计的模型进行了详细的阐述。我们将其细化分类为三类方法:Objectives Designing,Noise Schedule Optimization,Learnable Reverse Variance。
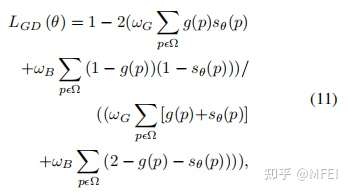
1.Objectives Designing方法利用扩散 SDE推倒出生成数据的对数似然与分数函数匹配的损失函数的关系。这样通过适当设计损失函数,就可以最大化 VLB 和对数似然。Song et al. 证明了可以设计损失函数的权重函数,使得plug-in reverse SDE 生成样本的似然函数值小于等于损失函数值,即损失函数是似然函数的上界。分数函数拟合的损失函数如下:

我们只需将权重函数设为扩散系数g(t)即可让损失函数成为似然函数的VLB,即:

2.Noise Schedule Optimization通过设计或学习前向过程的噪声进度来增大VLB。VDM证明了当离散步数接近无穷时,损失函数完全由信噪比函数SNR(t)的端点决定:

那么在离散步数接近无穷时,可以通过学习信噪比函数SNR(t)的端点最优化VLB,而通过学习信噪比函数中间部分的函数值来实现模型其他方面的改进。
3.Learnable Reverse Variance方法学习反向过程的方差,从而较少拟合误差,可以有效地最大化VLB。Analytic-DPM证明,在DDPM和DDIM中存在反向过程中的最优期望和方差:
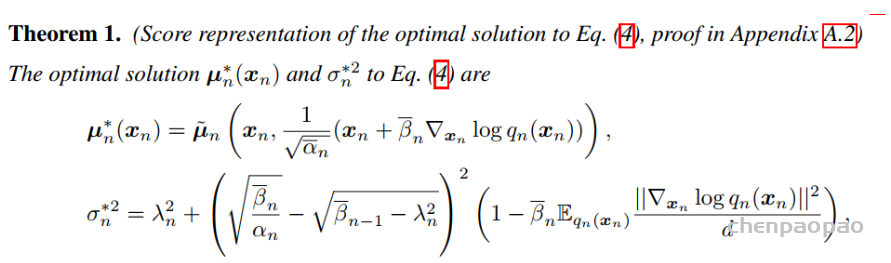
使用上述公式和训练好的分数函数,在给定前向过程的条件下,最优的VLB可以近似达到。
数据泛化增强
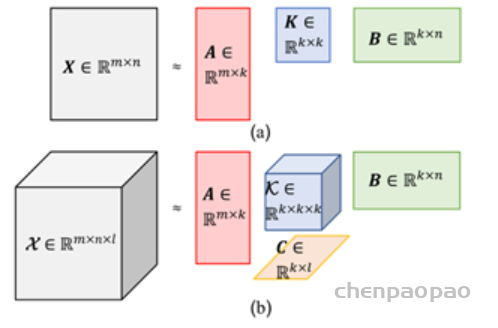
扩散模型假设数据存在于欧几里得空间,即具有平面几何形状的流形,并添加高斯噪声将不可避免地将数据转换为连续状态空间,所以扩散模型最初只能处理图片等连续性数据,直接应用离散数据或其他数据类型的效果较差。这限制了扩散模型的应用场景。数个研究工作将扩散模型推广到适用于其他数据类型的模型,我们对这些方法进行了详细地阐释。我们将其细化分类为两类方法:Feature Space Unification,Data-Dependent Transition Kernels。1.Feature Space Unification方法将数据转化到统一形式的latent space,然后再latent space上进行扩散。LSGM提出将数据通过VAE框架先转换到连续的latent space 上后再在其上进行扩散。这个方法的难点在于如何同时训练VAE和扩散模型。LSGM表明由于潜在先验是intractable的,分数匹配损失不再适用。LSGM直接使用VAE中传统的损失函数ELBO作为损失函数,并导出了ELBO和分数匹配的关系:

该式在忽略常数的意义下成立。通过参数化扩散过程中样本的分数函数,LSGM可以高效的学习和优化ELBO。
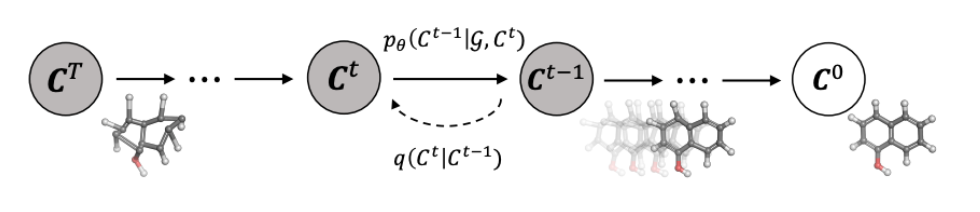
2.Data-Dependent Transition Kernels方法根据数据类型的特点设计diffusion process 中的transition kernels,使扩散模型可以直接应用于特定的数据类型。D3PM为离散型数据设计了transition kernel,可以设为lazy random-walk,absorbing state等。GEODIFF为3D分子图数据设计了平移-旋转不变的图神经网络,并且证明了具有不变性的初分布和transition kernel可以导出具有不变性的边缘分布。假设是一个平移-旋转变换,如:

那么生成的样本分布也有平移-旋转不变性:

和其他生成模型的联系
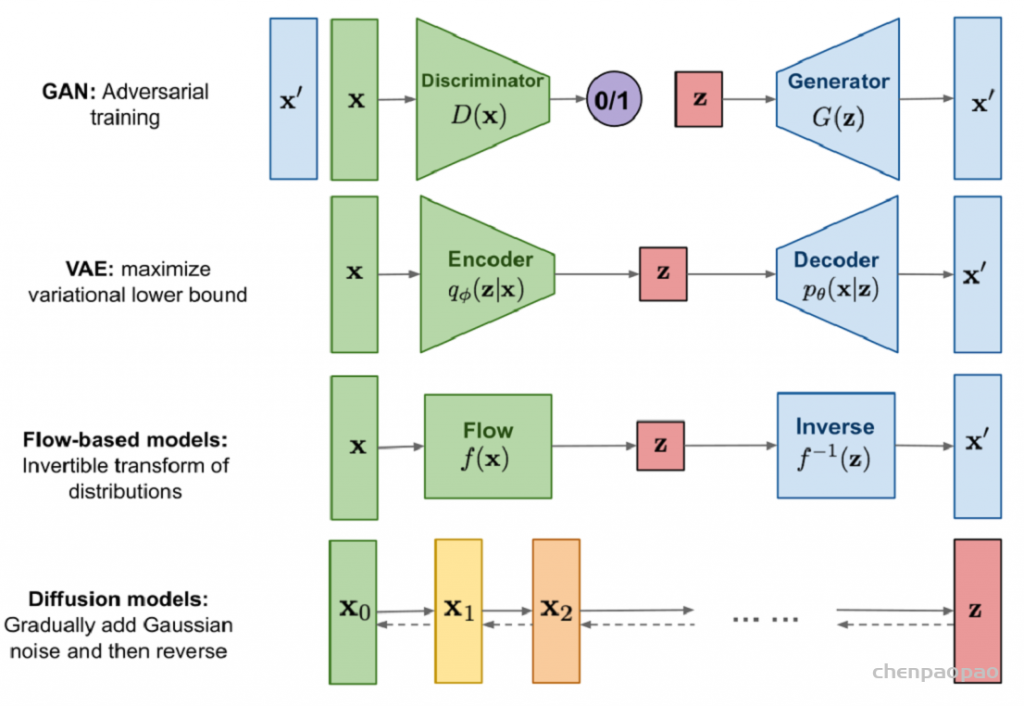
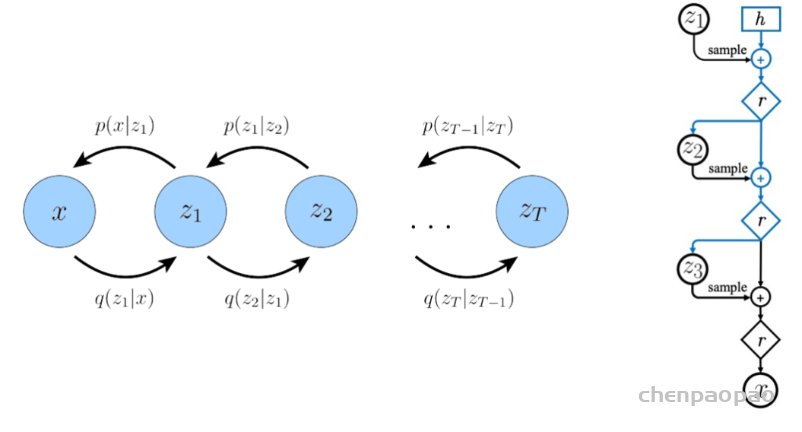
在下面的每个小节中,我们首先介绍其他五类重要的生成模型,并分析它们的优势和局限性。然后我们介绍了扩散模型是如何与它们联系起来的,并说明通过结合扩散模型来改进这些生成模型。VAE,GAN,Autoregressive model, Normalizing flow, Energy-based model和扩散模型的联系如下图所示:

- DDPM可以视作层次马尔可夫VAE(hierarchical Markovian VAE)。但DDPM和一般的VAE也有区别。DDPM作为VAE,它的encoder和decoder都服从高斯分布、有马尔科夫行;其隐变量的维数和数据维数相同;decoder的所有层都共用一个神经网络。
- DDPM可以帮助GAN解决训练不稳定的问题。因为数据是在高维空间中的低维流形中,所以GAN生成数据的分布和真实数据的分布重合度低,导致训练不稳定。扩散模型提供了一个系统地增加噪音的过程,通过扩散模型向生成的数据和真实数据添加噪音,然后将加入噪音的数据送入判别器,这样可以高效地解决GAN无法训练、训练不稳定的问题。
- Normalizing flow通过双射函数将数据转换到先验分布,这样的作法限制了Normalizing flow的表达能力,导致应用效果较差。类比扩散模型向encoder中加入噪声,可以增加Normalizing flow的表达能力,而从另一个视角看,这样的做法是将扩散模型推广到前向过程也可学习的模型。
- Autoregressive model在需要保证数据有一定的结构,这导致设计和参数化自回归模型非常困难。扩散模型的训练启发了自回归模型的训练,通过特定的训练方式避免了设计的困难。
- Energy-based model直接对原始数据的分布建模,但直接建模导致学习和采样都比较困难。通过使用扩散恢复似然,模型可以先对样本加入微小的噪声,再从有略微噪声的样本分布来推断原始样本的分布,使的学习和采样过程更简单和稳定。
扩散模型的应用
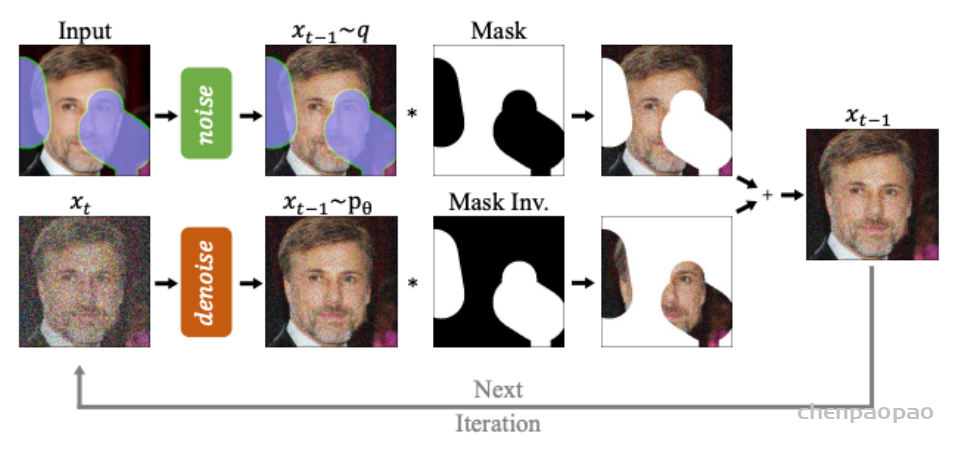
在本节中,我们分别介绍了扩散模型在计算机视觉、自然语言处理、波形信号处理、多模态学习、分子图生成、时间序列以及对抗学习等七大应用方向中的应用,并对每类应用中的方法进行了细分并解析。例如在计算机视觉中可以用diffusion model进行图像补全修复(RePaint):
在多模态任务中可以用diffusion model进行文本到图像的生成(GLIDE):

还可以在分子图生成中用diffusion model进行药物分子和蛋白质分子的生成(GeoDiff):
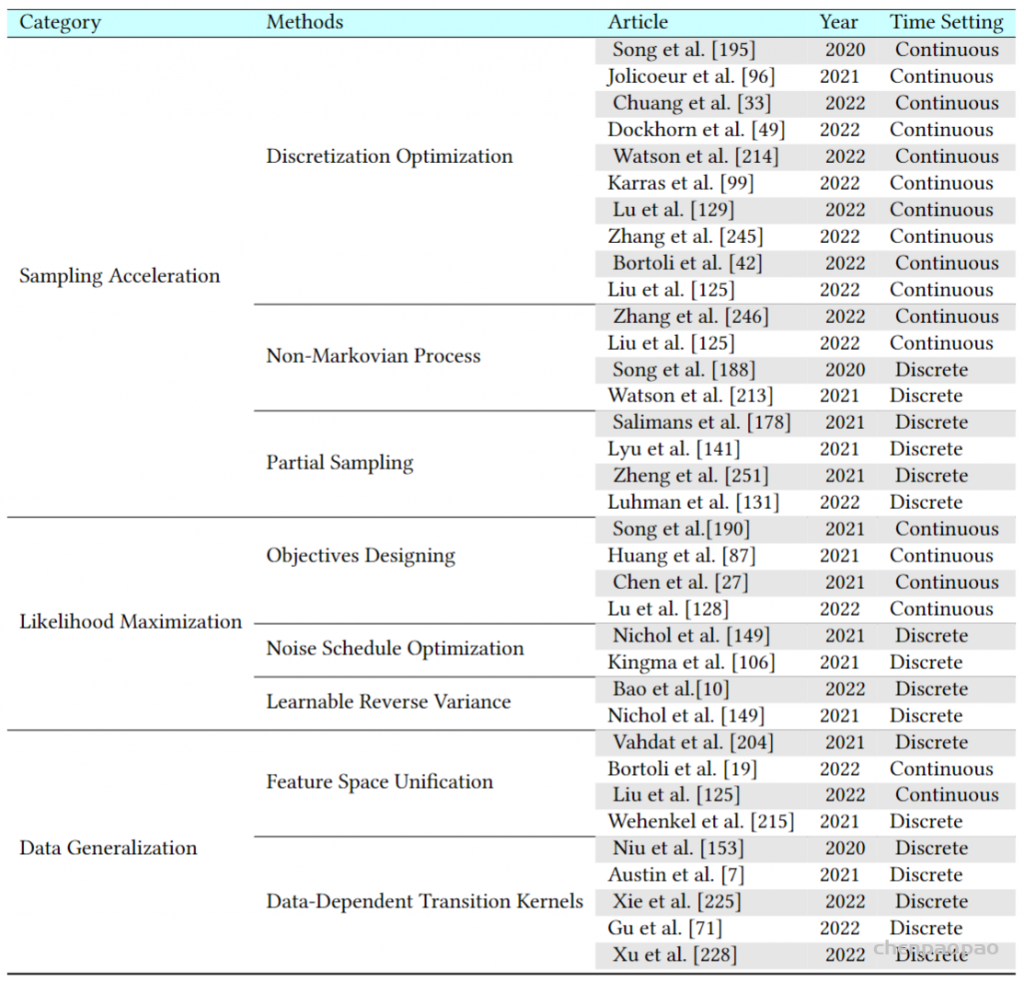
应用分类汇总见表:

未来研究方向
- 应用假设再检验。我们需要检查我们在应用中普遍接受的假设。例如,实践中普遍认为扩散模型的前向过程会将数据转换为标准高斯分布,但事实并非如此,更多的前向扩散步骤会使最终的样本分布与标准高斯分布更接近,与采样过程一致;但更多的前向扩散步骤也会使估计分数函数更加困难。理论的条件很难获得,因此在实践中操作中会导致理论和实践的不匹配。我们应该意识到这种情况并设计适当的扩散模型。
- 从离散时间到连续时间。由于扩散模型的灵活性,许多经验方法可以通过进一步分析得到加强。通过将离散时间的模型转化到对应的连续时间模型,然后再设计更多、更好的离散方法,这样的研究思路有前景。
- 新的生成过程。扩散模型通过两种主要方法生成样本:一是离散化反向扩散 SDE,然后通过离散的反向 SDE 生成样本;另一个是使用逆过程中马尔可夫性质对样本逐步去噪。然而,对于一些任务,在实践中很难应用这些方法来生成样本。因此,需要进一步研究新的生成过程和视角。
- 泛化到更复杂的场景和更多的研究领域。虽然目前diffusion model已经应用到多个场景中,但是大多数局限于单输入单输出的场景,将来可以考虑将其应用到更复杂的场景,比如text-to-audiovisual speech synthesis。也可以考虑和更多的研究领域相结合。
part2:【扩散模型笔记整理】从DDPM到Imagen
扩散模型(Diffusion Model)
1. 概述
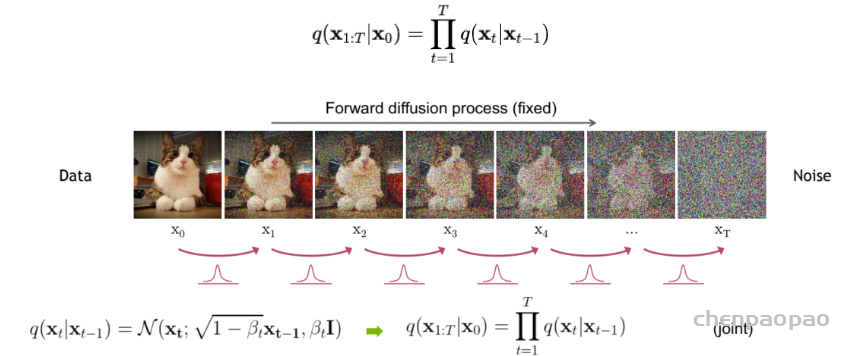
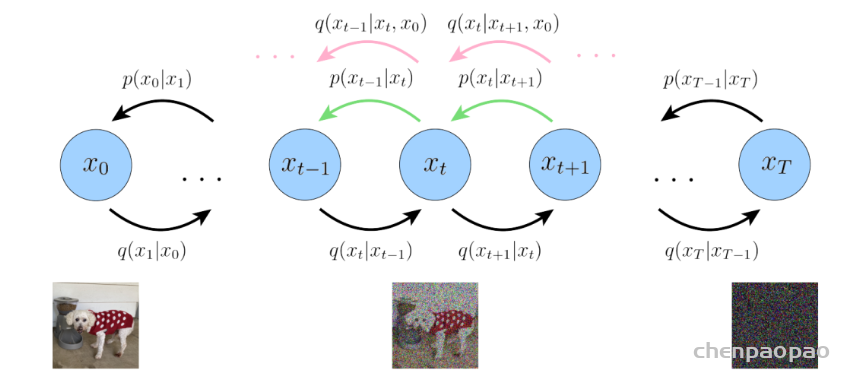
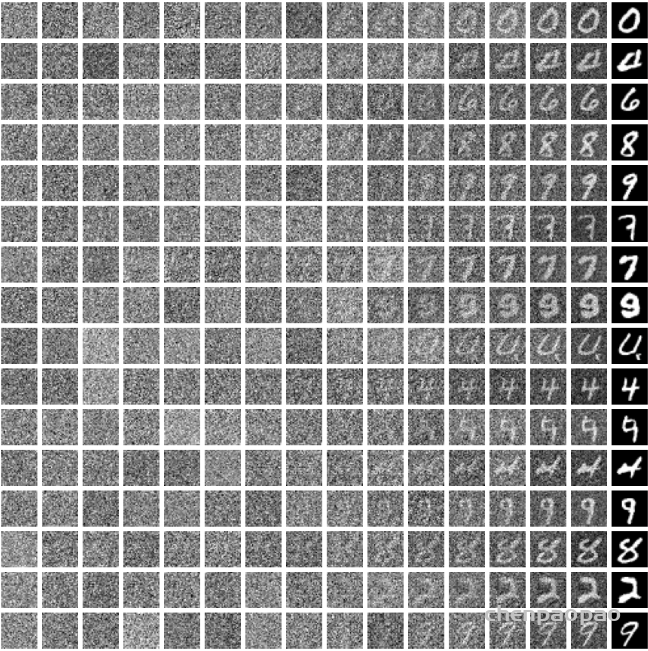
- 如图所示,扩散模型分两个过程:扩散(diffusion, 从x0到xT的过程逐步加入噪声)和去噪(denoise, 从xT到x0逐步去噪)。训练的时候,需要利用扩散加噪来生成训练样本;推理的时候,输入一个噪音,逐步去噪输出原始信号(比如图像、语音)。
参考文献:Denoising Diffusion Probabilistic Models
2. 扩散和去噪(Diffusion&Denoise)
- 首先介绍一下高斯分布的表达,记作X∽N(μ,σ2):
扩散过程每一步都加入一个方差为βt∈(0,1)的高斯噪声可以用马尔科夫链来表示:
- 这里的βt是一个0到1的等比序列(β0=0),此时表示原始图像;第T步的时候,βt=1,表示标准高斯噪声N∽(0,I)。因而实际上扩散过程是一个从原始图像变为标准高斯分布的过程。加噪和高斯采样等价,无非就是改变了一下高斯采样的均值中心点。
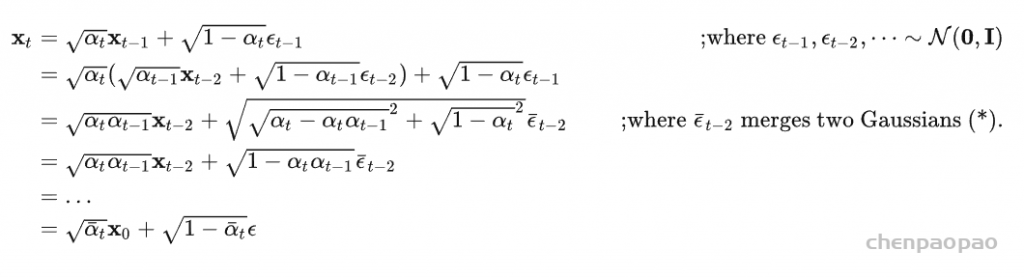
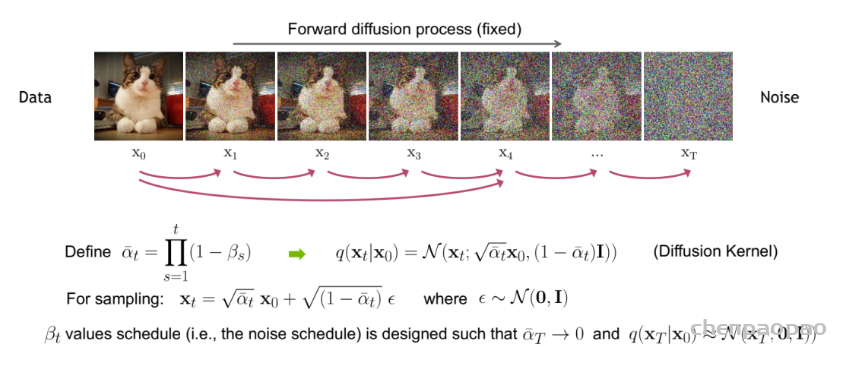
- 实际训练的时候,我们可以直接用下面的公式一次性算出某一步的加噪图片作为训练素材,无需逐步迭代。
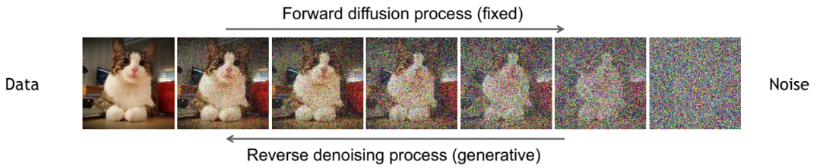
- 去噪过程和扩散过程反过来:从一张随机采样的高斯噪声图片逐步去噪得到我们想要生成的图像。表达式:

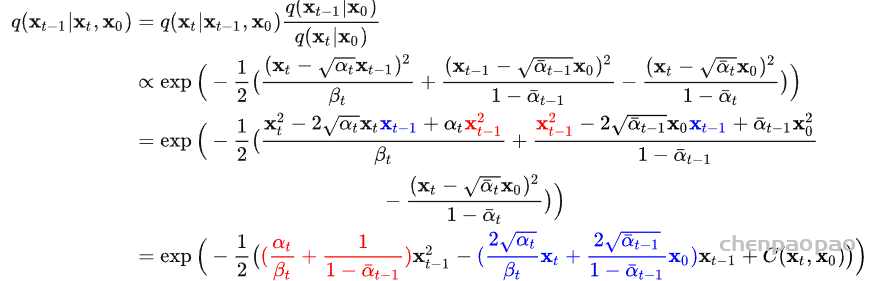
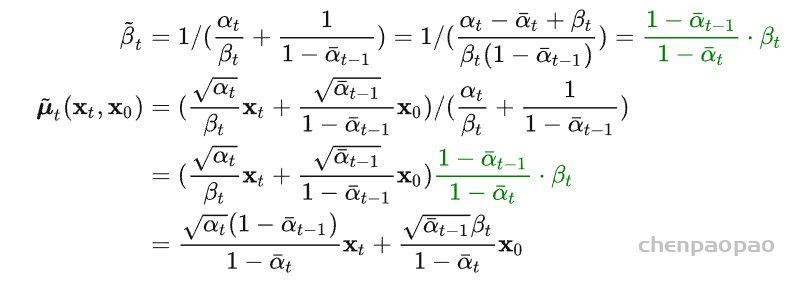
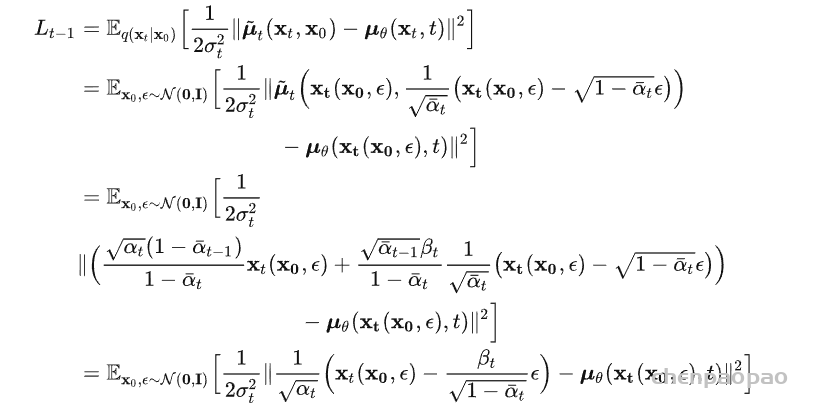
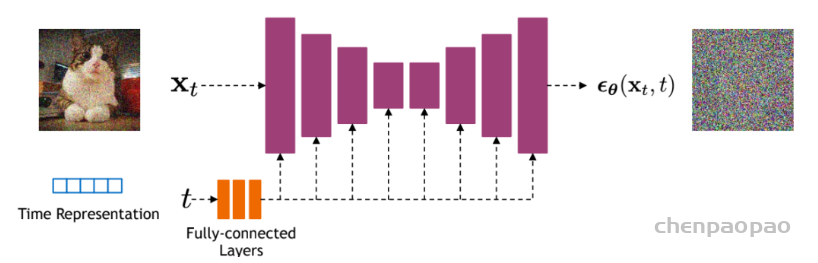
- 去噪过程,需要用模型预测加入的高斯噪声,得到原始的无噪声的图像。上式表示,利用模型算出原始第n步的未加噪图像,实质上只要算出均值和方差,再做一个采样得到原始图像。而为了算出μ,我们需要预测出噪声ϵ,反推出原始图像的均值中心,方差项可以由网络预测也可以取常数(前者效果好)。下节将介绍模型的训练和推理过程。
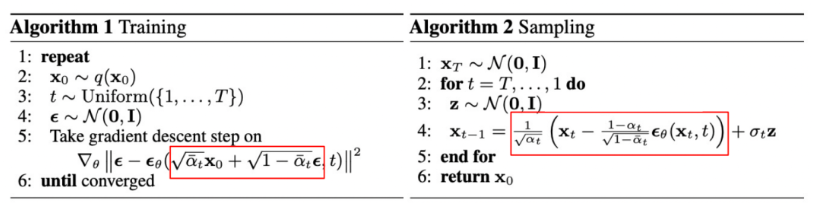
3. 训练和采样(Training&Sampling)
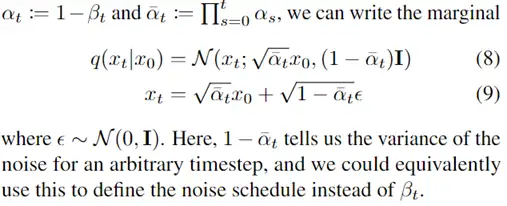
- 训练其实就是扩散过程,而采样其实就是去噪过程。
- 算法如上图所示,训练training的过程实际上是随机采第t步的加噪图像,输入带噪图片以及步数t,模型预测噪声ϵ,模型训练目标:预测噪声与实际加入噪声的误差越小越好。
- 采样sampling的过程(生成过程)为:将有噪声的图像(第一张图像为随机采样的高斯分布噪声)减去模型预测的噪声(噪声前面的其它参数可以由上面加噪的过程反向推导出来)不断把噪声去掉以恢复出原始的图像。

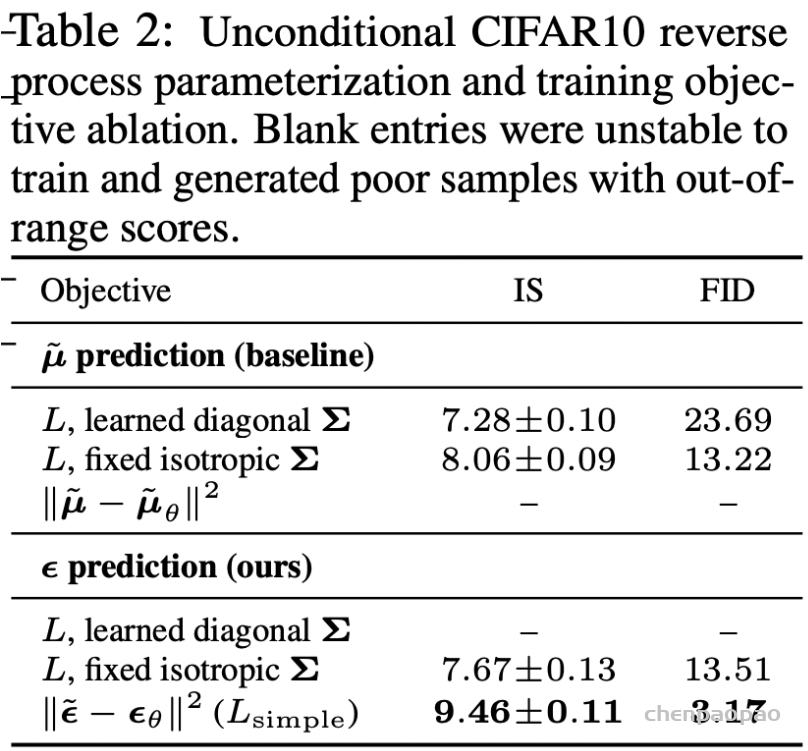
- 方差项σ也可以由模型来预测。
参考文献: Improved Denoising Diffusion Probabilistic Models
引导扩散模型(Guided Diffusion)
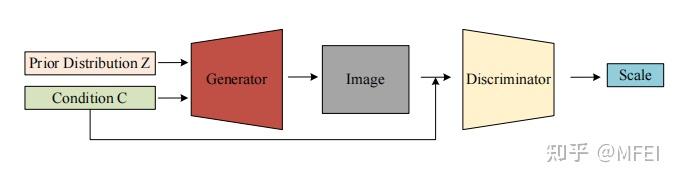
前文已经讲述扩散模型的原理,然而我们随机输入一张高斯噪声显然不能按照人的意愿生成我们想要的内容,因而需要额外的引导guidance以得到我们需要的图像。一种想法是使用外部模型(分类器or广义的判别器)的输出作为引导条件来指导扩散模型的去噪过程,从而得到我们想要的输出;还有一种则比较直观一些:我们直接把我们想要的引导条件condition也作为模型输入的一部分,从而让扩散模型见到这个条件后就可以直接生成我们想要的内容。
下文将讲解classifier guidance和semantic guidance diffusion model(后者包括前者,前者是比较简单的一个应用),除此之外,由于额外的判别器会拖慢推理速度,因此后来有人提出了 classifier-free guidance diffusion model来替代前面的那种方案,也即把条件作为模型的输入,直接生成我们需要的图像。
1. Classifier Guidance Diffusion Model
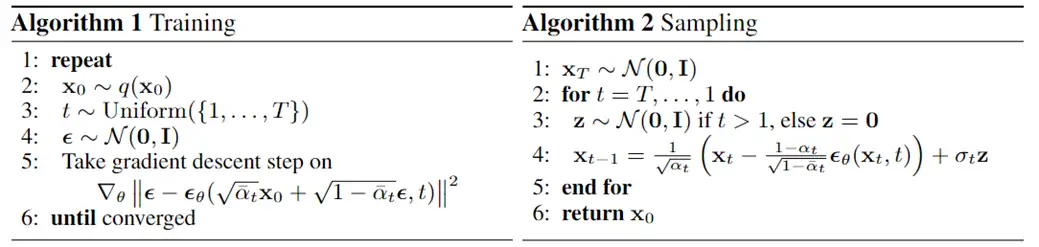
- 这种方法不用额外训练扩散模型,直接在原有训练好的扩散模型上,通过外部的分类器来引导生成期望的图像。唯一需要改动的地方其实只有sampling过程中的高斯采样的均值,也即采样过程中,期望噪声图像的采样中心越靠近判别器引导的条件越好。
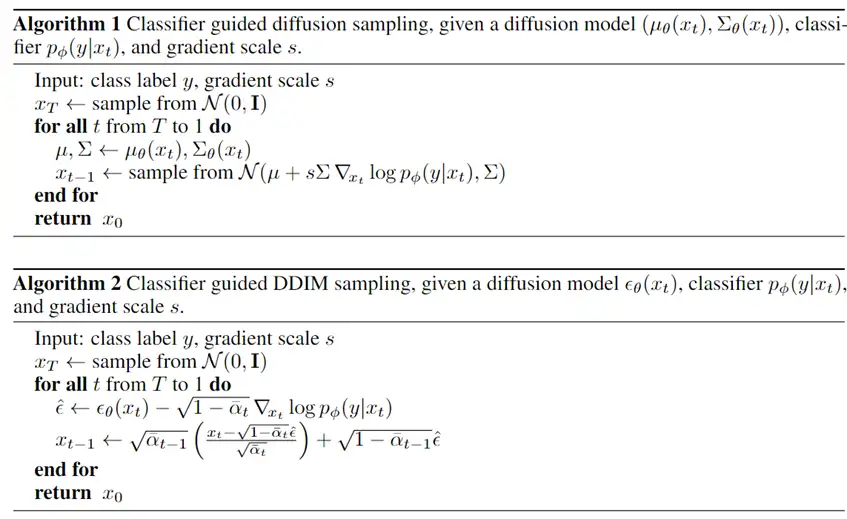
- 上图总结了采样算法。Algorithm 1和 Algorithm 2其实是等价的(1是直接预测均值和方差,2是预测噪声的误差)。直接看Algorithm 1可知,实质上改变的只有高斯分布的均值中心,将扩散方向“引导”成我们想要的内容。具体而言,用分类模型pϕ对生成的图片进行分类,得到预测分数与目标类别的交叉熵,将其对带噪图像求梯度用梯度引导下一步的生成采样。(实际使用的时候,需要把这个分类器也在带噪数据额外训练一下)
- 因为我们实际使用的模型预测的是噪音,实际计算为Algorithm 2,可以由1推导而来。(具体推导过程可以参考文献)
参考文献:Diffusion Models Beat GANs on Image Synthesis
2. Semantic Guidance Diffusion
- 介绍完前面的 classifier guidance后,显然我们可以把分类器替换成其它任意的判别器,也即更换引导条件,从而实现利用不同的语义信息来指导扩散模型的去噪过程。比如说,我们可以实现text-guidance和image-guidance等。
- 实质上就是把classifier guidance的条件推广,表达为:


- Fϕ表示就是新的引导条件,这里展示的是分类的,其实也可以换成相似度之类的分数指标。具体可以有以下的例子:图像引导、文本引导、图像+文本引导。
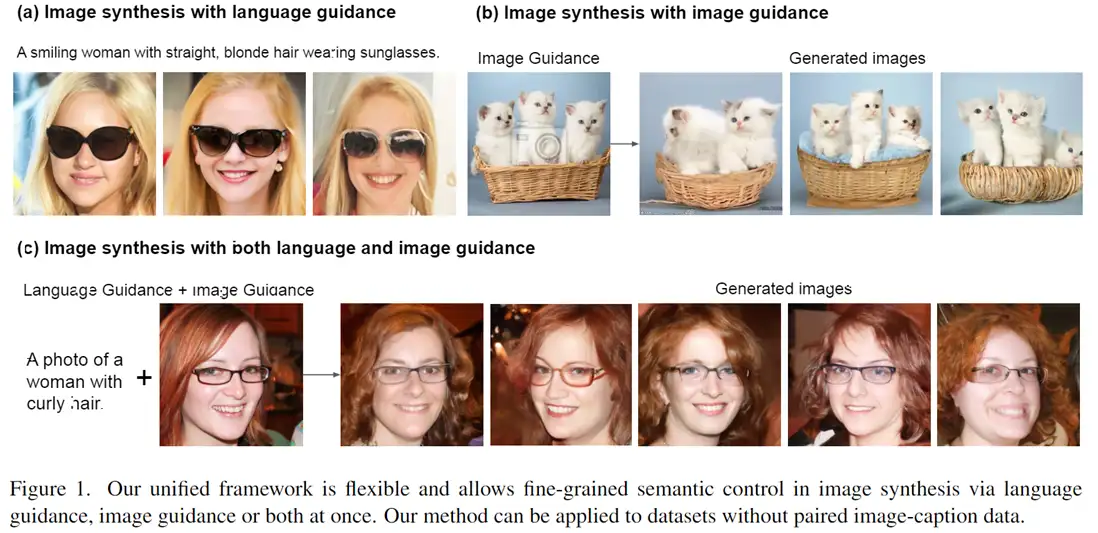
参考文献:More Control for Free! Image Synthesis with Semantic Diffusion Guidance
3. Classifier-Free Guidance Diffusion
- 正如前文提到的,额外引入一个网络来指导,推理的时候比较复杂(扩散模型需要反复迭代,每次迭代都需要额外算一个分数)。然而,直接将引导条件作为模型的输入,直到Classifier-Free Diffusion Guidance被提出前似乎效果也一般般。Classifier-Free Diffusion Guidance这篇文章的贡献就是提出了一个等价的结构替换掉了外部的判别器,从而可以直接用一个扩散模型来做条件生成任务。
- 实际做法只是改变了模型输入的内容,有conditional(除了随机高斯噪声输入外,把引导信息的embedding也加进来)和unconditional 的 sample输入。两种输入都会被送到同一个diffusion model从而让其能够具有无条件和有条件生成的能力。得到这两种输入的输出后,就可以用来引导扩散模型进行训练。
- 回忆一下前面的 classifier guidance的噪音更新方式:

- 实质上,这个classifier-free用另一个近似的等价结构替换掉了后面那一项:

- 其中,ϵθ(xt,y) 表示conditional的输入,而ϵθ(xt)则表示unconditional输入,用这两项之差乘以一个系数来替换掉原来的那项。至于为什么可以这么直接替换,其实可以用贝叶斯公式推导而来:
- 因而,实际上这个过程就训练了一个 implicit classifier,从而移除外部的分类器。
参考文献:Classifier-Free Diffusion Guidance
GLIDE
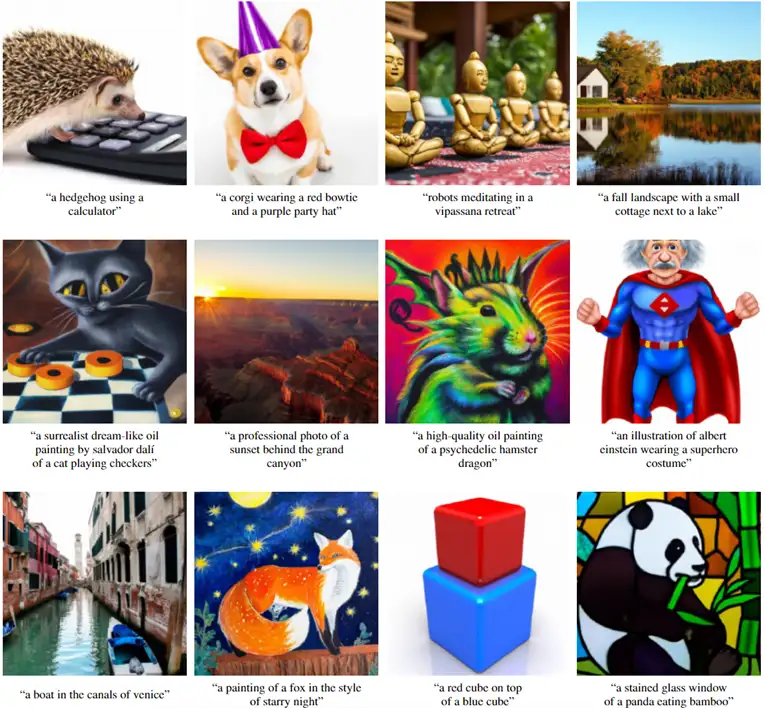
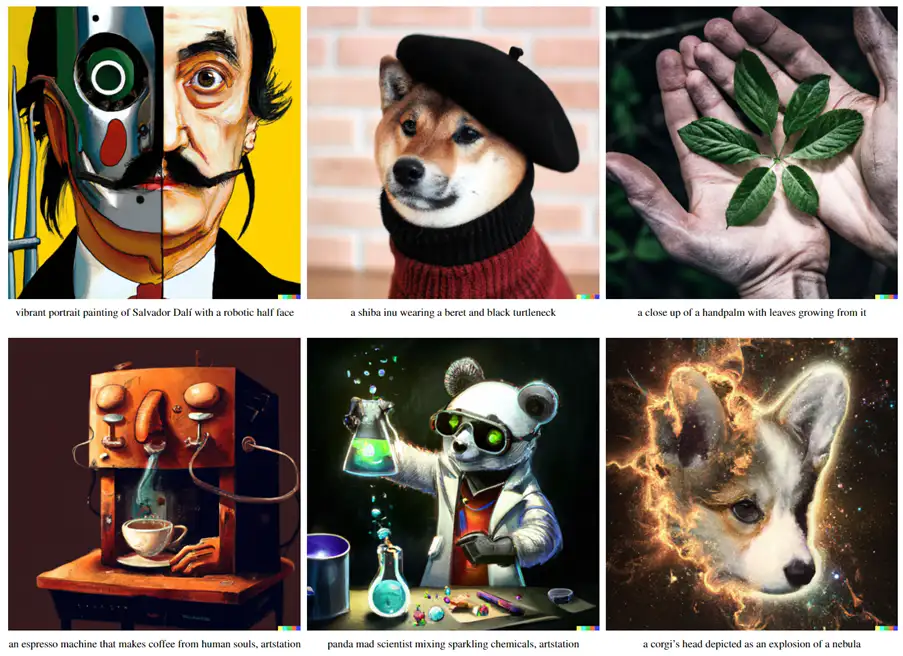
- 这篇文章主要就是用到了前面所说的classifier-free扩散模型,只不过把输入的condition换成了文本信息,从而实现文本生成图像,此外还利用diffusion model实现了超分辨率。一些效果展示如下,可以看到,其实已经可以生成一些比较逼真的图片了。
- 具体可以表达为:

- 这里无非就是把原来的label y换成了 caption,实际上就是运用了足够量的image-text pair从而可以把caption当作是某种程度上的label。(随机替换为空序列以实现unconditional的训练方式)

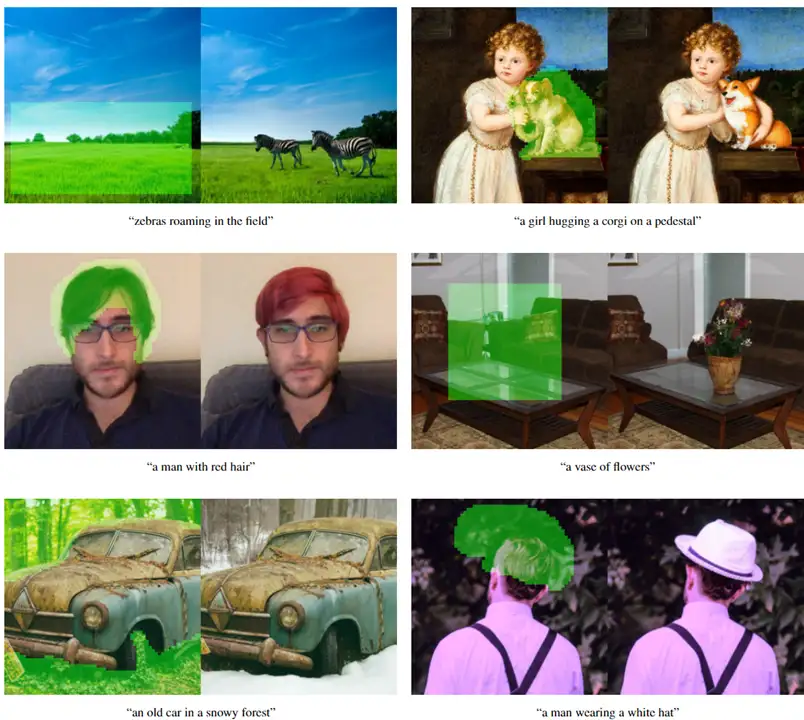
- 由于此时的生成图像质量一般般,文章也提供了图像编辑的方式(具体操作为:将选中区域mask掉,将图像也作为一个condition连同文本输入到模型中去):
DALL·E 2
概况
- 第一版DALL·E用的是GAN+CLIP重排序的结构。
- DALL·E 2可以把diffusion model和CLIP结合在一起,生成效果十分惊艳,可以直接去官网浏览一下。DALL·E 2 (openai.com)
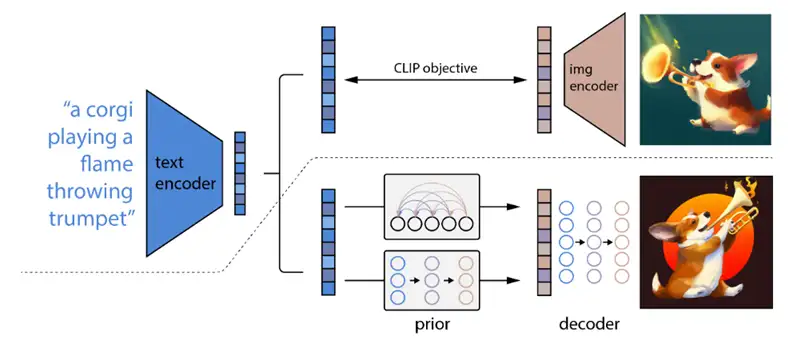
- 包括prior网络用于将caption转换为CLIP image embedding,一个decoder把image embedding作为condition来生成图像。prior有两种:一种是autoregressive model、一种是diffusion model(后者效果更好一些);decoder就是diffusion model。总之,这里相比前面的变化主要在于加入了prior,以及把condition换成了CLIP的embedding。
Decoder
- 具体而言,把CLIP image embedding作为condition输入到diffusion model中,同时把CLIP image embedding映射成4个额外的tokens接到GLIDE text encoder的输出。
- 除了用于生成图像的diffusion model,这部分还有2个额外用于超分辨率的diffusion model,生成高清图像。
Prior
这部分的内容是为了将caption y转换为 CLIP image embedding,以用于后面decoder的图像生成。
- 一种是auto-regressive model,将image embedding转换为一串离散的编码,并且基于condition caption y自回归地预测。(这里不一定要condition on caption(GLIDE的方法——额外用一个Transformer处理caption),也可以condition on CLIP text embedding)。此外,这里还用到了PCA来降维,降低运算复杂度。
- 一种是diffusion model。这是一个decoder-only Transformer,输入是encoded text+CLIP text embedding+noised CLIP image embedding+额外token(类似class embedding)输入,其输出一个unnoised CLIP image embedding(取那个额外的embedding)。
Variations
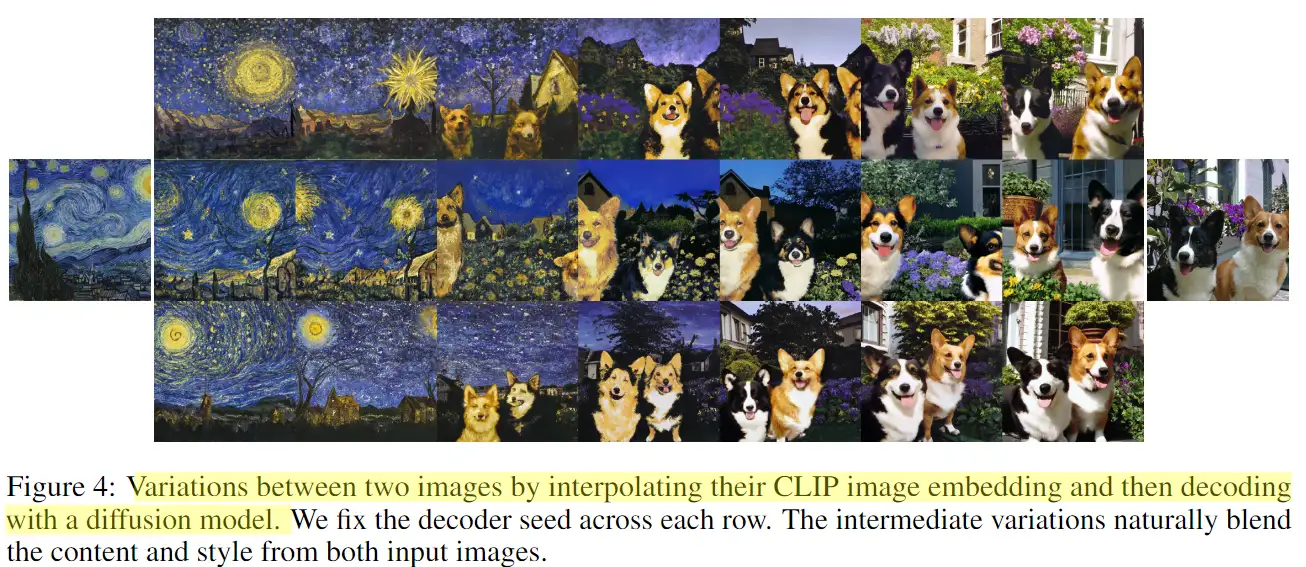
- 这部分是为了给一张图,生成相似的图像。做法很简单:用CLIP把图像编码,把这个CLIP image embedding作为condition引导decoder生成图像。除此之外,还可以对2张图像的CLIP embedding进行插值,以实现风格迁移。( spherical interpolation 几何球面线性插值)。这里证明了CLIP语义空间的可解释性
量化结果
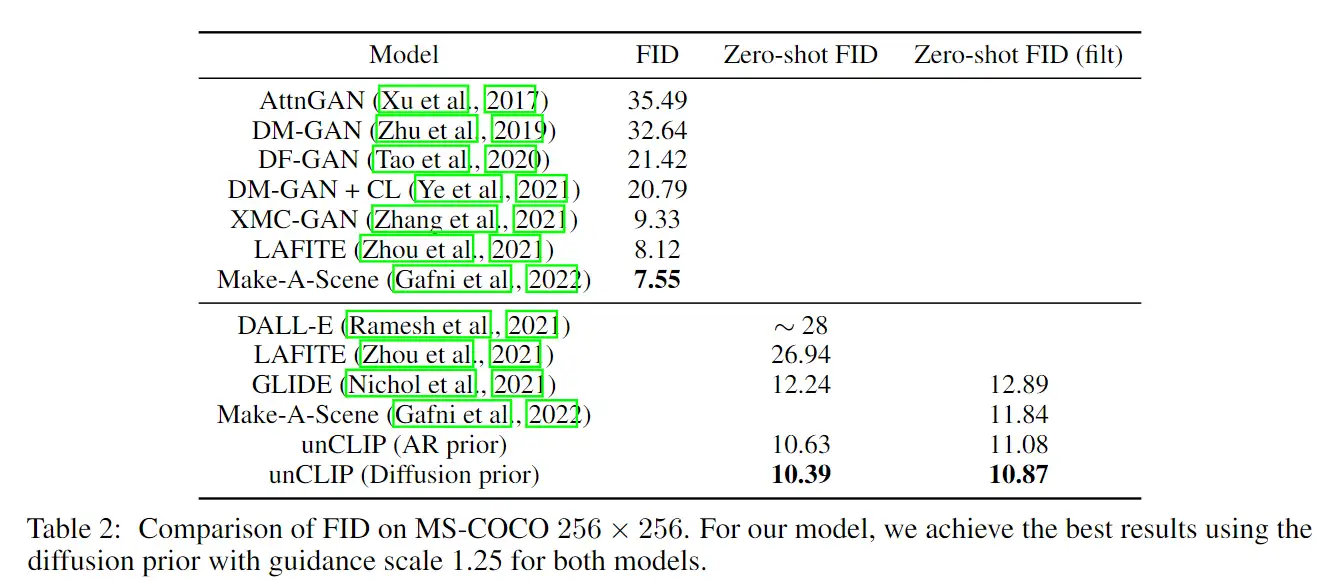
- 本文方法又称unCLIP(其实本质上就是把CLIP生成的embedding进行decode),相比GLIDE有小幅的提高。
Paper List
- (DDPM) Denoising Diffusion Probabilistic Models. NIPS 20. (Diffusion and deep-learning-based 图像生成开山之作)
- More Control for Free! Image Synthesis with Semantic Diffusion Guidance. arXiv 21. (对DDIM进行了推广,引入了一般形式的判别器引导)
- Denoising Diffusion Implicit Models. ICLR 21. (提出了一种新的sampling的方法,可以通过改变eta来skip一些step,进而达到加速sampling的目的)
- Improved denoising diffusion probabilistic models. ICML 21.
- Classifier-Free Diffusion Guidance. NIPSW 21. (引入了等价结构替代了分类器引导)
- GLIDE: Towards Photorealistic Image Generation and Editing with Text-Guided Diffusion Models. ICML 22.
- Hierarchical Text-Conditional Image Generation with CLIP Latents. NIPS 22 在投. (DALL-E 2)
- Photorealistic Text-to-Image Diffusion Models with Deep Language Understanding. NIPS 22 在投. (Imagen, SOTA)
- High-Resolution Image Synthesis with Latent Diffusion Models. CVPR 22. (隐空间LDM)