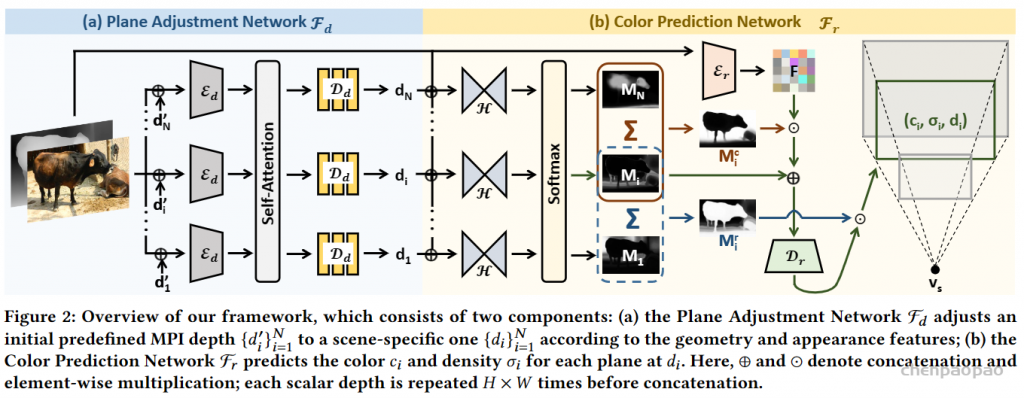
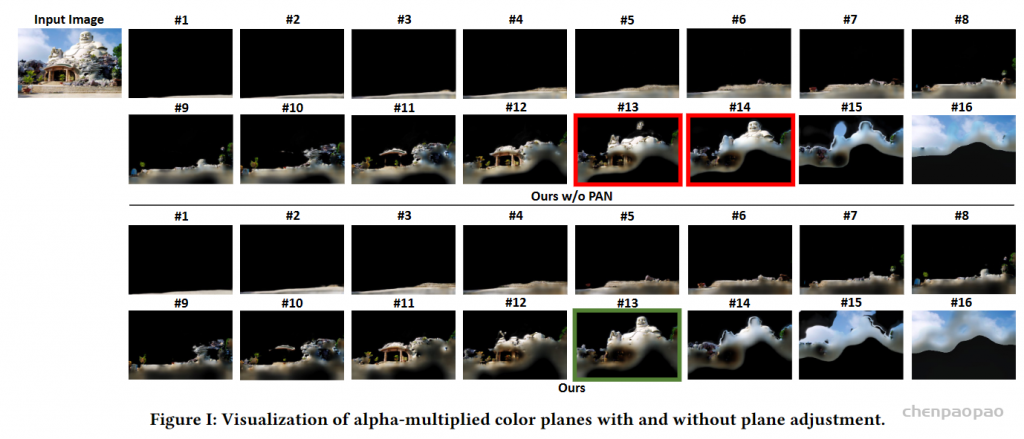
该网络旨在从输入图像和其深度图中预测N个平面,每个平面都有颜色通道ci、密度通道σi和深度di。该网络由两个子网络组成:平面调整网络Fd和颜色预测网络Fr。首先,使用现成的单目深度估计网络[Ranftl et al. 2021]获取深度图。然后,将Fd应用于推断平面深度{di}N_i=1,并将Fr应用于预测每个di处的颜色和密度{ci, σi}N_i=1。因此,该网络可以生成多平面图像,其中每个平面都具有不同的颜色、密度和深度值。
In recent years, tremendous amount of progress is being made in the field of 3D Machine Learning, which is an interdisciplinary field that fuses computer vision, computer graphics and machine learning. This repo is derived from my study notes and will be used as a place for triaging new research papers.
I’ll use the following icons to differentiate 3D representations:
📷 Multi-view Images
👾 Volumetric
🎲 Point Cloud
💎 Polygonal Mesh
💊 Primitive-based
To find related papers and their relationships, check out Connected Papers, which provides a neat way to visualize the academic field in a graph representation.
Get Involved
To contribute to this Repo, you may add content through pull requests or open an issue to let me know.
⭐ ⭐ ⭐ ⭐ ⭐ ⭐ ⭐ ⭐ ⭐ ⭐ ⭐ ⭐ We have also created a Slack workplace for people around the globe to ask questions, share knowledge and facilitate collaborations. Together, I’m sure we can advance this field as a collaborative effort. Join the community with this link. ⭐ ⭐ ⭐ ⭐ ⭐ ⭐ ⭐ ⭐ ⭐ ⭐ ⭐ ⭐
[ECCV 2020] DTVNet: Dynamic Time-lapse Video Generation via Single Still Image [paper][code]
[SIGGRAPH Asia 2019] Animating Landscape: Self-Supervised Learning of Decoupled Motion and Appearance for Single-Image Video Synthesis [paper][code][project page]
[CVPR 2018] Learning to Generate Time-lapse Videos Using Multi-stage Dynamic Generative Adversarial Networks [paper][code][project page]
Some Other Papers
Some other interesting papers for novel view synthesis or cinemagraph.
[arXiv 2022] Make-A-Video: Text-to-Video Generation without Text-Video Data [paper][project page]
[ECCV 2022] SinNeRF: Training Neural Radiance Fields on Complex Scenes from a Single Image [paper][code][project page] 🚕
[CVPR 2022] Look Outside the Room: Synthesizing A Consistent Long-Term 3D Scene Video from A Single Image [paper][code][project page]
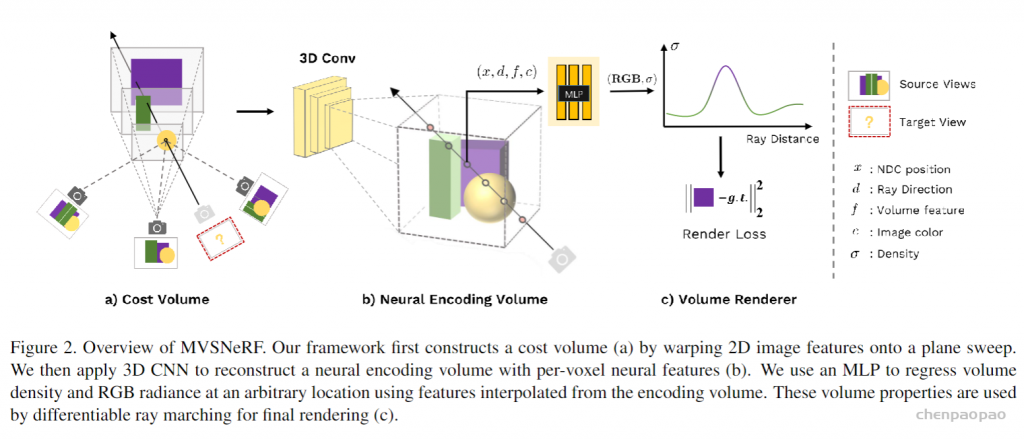
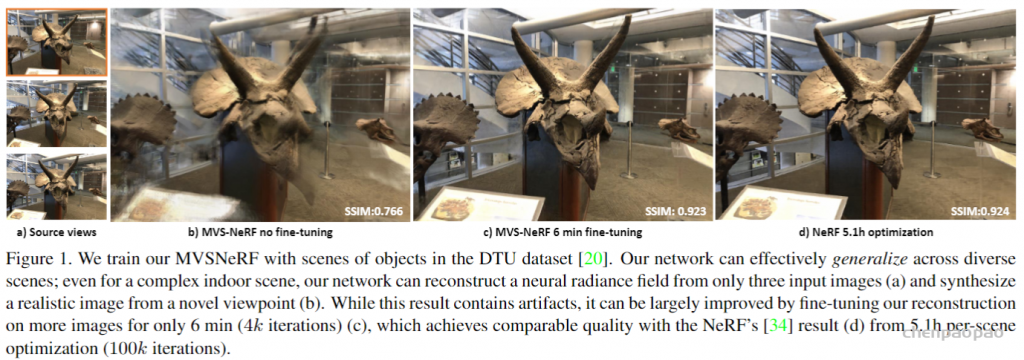
提出了一种新的神经渲染方法neural rendering approach MVSNeRF,它可以有效地重建用于视图合成的神经辐射场。与先前关于神经辐射场的工作不同,这些工作考虑对密集捕获的图像进行逐场景优化,我们提出了一种通用的深度神经网络,该网络可以通过快速网络推理仅从三个附近的输入视图重建辐射场。我们的方法利用平面扫描成本体plane-swept cost volumes(广泛用于多视图立体multi-view stereo)进行几何感知场景推理,并将其与基于物理的体渲染相结合进行神经辐射场重建。我们在DTU数据集中的真实对象上训练我们的网络,并在三个不同的数据集上测试它以评估它的有效性和可推广性generalizability我们的方法可以跨场景(甚至室内场景,完全不同于我们的对象训练场景)进行推广generalize across scenes,并仅使用三幅输入图像生成逼真的视图合成结果,明显优于目前的广义辐射场重建generalizable radiance field reconstruction工作。此外,如果捕捉到密集图像dense images are captured,我们估计的辐射场表示可以容易地微调easily fine-tuned;这导致快速的逐场景重建fast per-scene reconstruction,比NeRF具有更高的渲染质量和更少的优化时间。
我们利用最近在深度多视图立体(MVS)deep multi- view stereo (MVS)上的成功[50,18,10]。这一系列工作可以通过对成本体积应用3D卷积applying 3D convolutions on cost volumes来训练用于3D重建任务的可概括的神经网络。与[50]类似,我们通过将来自附近输入视图的2D图像特征(由2D CNN推断)扭曲warping到参考视图的平截头体中的扫描平面上sweeping planes in the reference view’s frustrum,在输入参考视图处构建成本体。不像MVS方法[50,10]仅在这样的成本体积上进行深度推断depth inference,我们的网络推理关于场景几何形状和外观reasons about both scene geometry and appearance,并输出神经辐射场(见图2),实现视图合成。具体来说,利用3D CNN,我们重建(从成本体)神经场景编码体neural scene encoding volume,其由 编码关于局部场景几何形状和外观的信息的每个体素神经特征per-voxel neural features 组成。然后,我们利用多层感知器(MLP)在编码体积encoding volume内使用三线性插值神经特征tri-inearly interpolated neural features来解码任意连续位置处的体积密度volume density和辐射度radiance。本质上,编码体是辐射场的局部神经表示;一旦估计,该体积可以直接用于(丢弃3D CNN)通过可微分射线行进differentiable ray marching(如在[34]中)的最终渲染。
Geometry-Free View Synthesis: Transformers and no 3D Priors
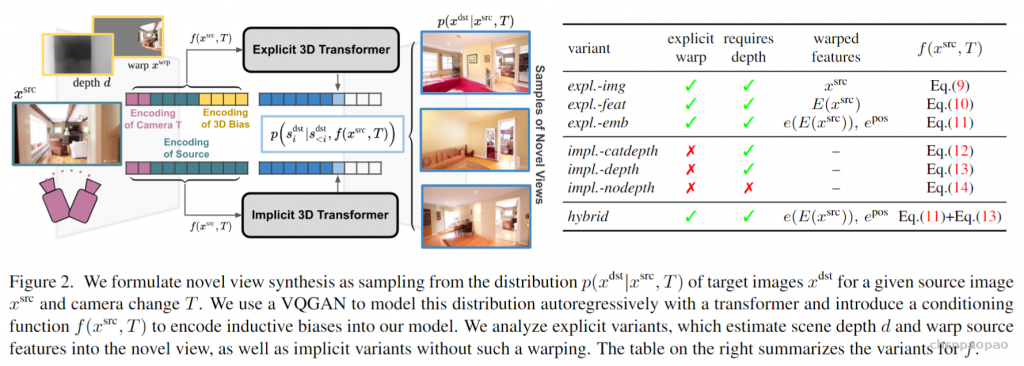
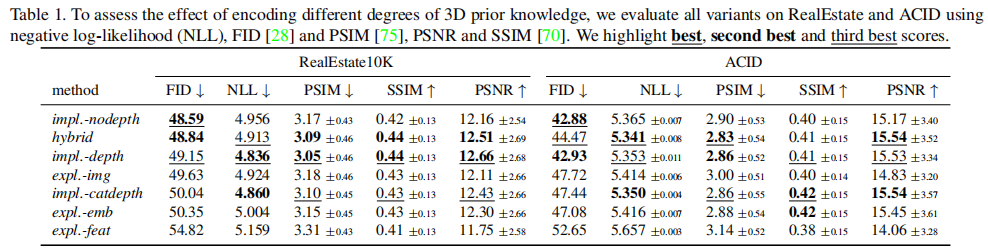
引入一种基于 transformers 的概率方法,用于从具有大视角变化的单一源图像中进行新视图合成。作者对transformers 的各种显式和隐式 3D 感应偏置进行比较,结果表明,在架构中显式使用 3D 变换对其性能没有帮助。此外,即使没有深度信息作为输入,模型也能学会在其内部表示中推断深度。这两种隐式 transformer 方法在视觉质量和保真度上都比目前的技术状态有显着的改进。
潜在空间中的概率视图合成: 为了学习上式中分布,需要捕获源视图和目标视图之间的远程交互的模型,以隐式地表示几何变换。由于基于相似的模型已经被证明直接在像素空间中建模图像时,在像素的短程交互上花费了太多的容量,我们遵循VQGAN并采用了两个阶段训练。第一阶段执行反向(对抗性)引导的离散表示学习(VQGAN),获得一个抽象的潜在空间,已被证明非常适合有效地训练生成式transformer。 建模条件图像模型: VQGAN包括一个编码器E,解码器G和一个离散表征zi(dz)的codebook Z。训练后的VQGAN允许编码任意x(HxWx3)到离散隐空间E(x)(h x w x dz)。以栅格扫描的顺序展开,这个潜在的表示形式对应于一个序列s(h x w x dz),可以等价地表示为一个整数序列,索引已学习的码本。按照通常的名称,我们将序列元素称为“tokens”。一个嵌入函数g=g(s) (hw x de)将每个tokens映射到transformer的嵌入空间中,并添加了可学习的位置编码。类似地,为了编码输入视图xsrc和照相机转换T,两者都由一个函数f映射到嵌入空间中:
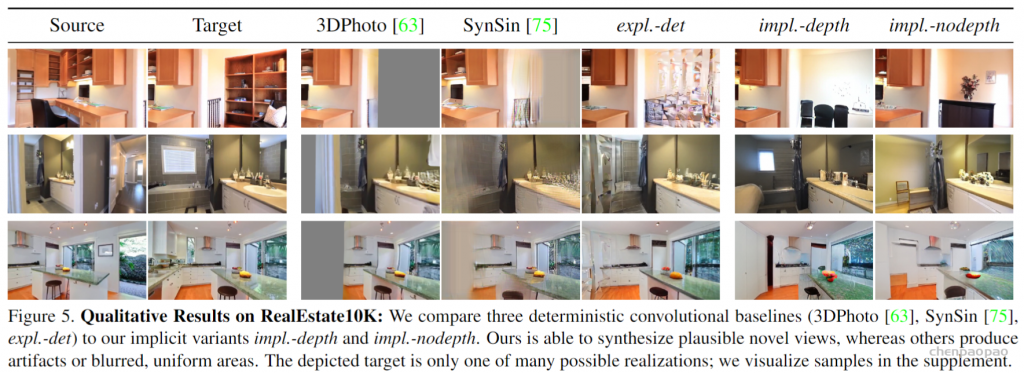
隐式几何变换:接下来,我们描述我们用来分析的隐式变量,transformer能否同样好地处理所有位置,是否需要在模型中内置一个显式的几何转换。我们使用与显式变体相同的符号。 (4)第一个变体impl.-catdepth为transformer提供了显式变体中使用的所有相同组件:相机参数K、R、t、估计深度d和源图像xsrc。相机参数被拉平并连接到T^,通过Wcam(de x 1)映射到嵌入空间。深度和源图像被VQGAN编码器Ed和E编码来获得
与其他变体相比,这个序列大约长32倍,这是计算成本的两倍。 (5)因此,我们还包括了一个impl.-depth变体,它连接了深度和源图像的离散代码,并用一个矩阵W(de x 2dz)映射它们到嵌入空间以避免序列长度增加:
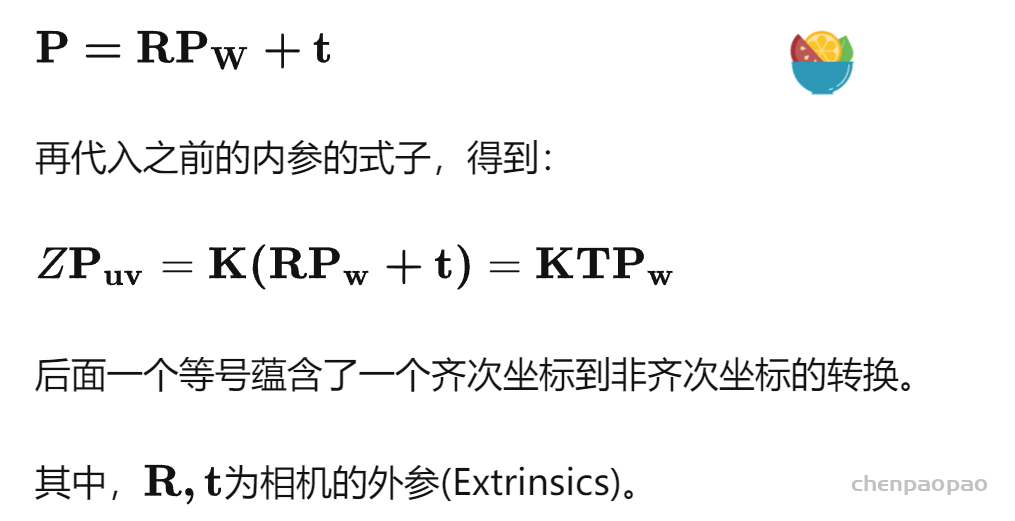
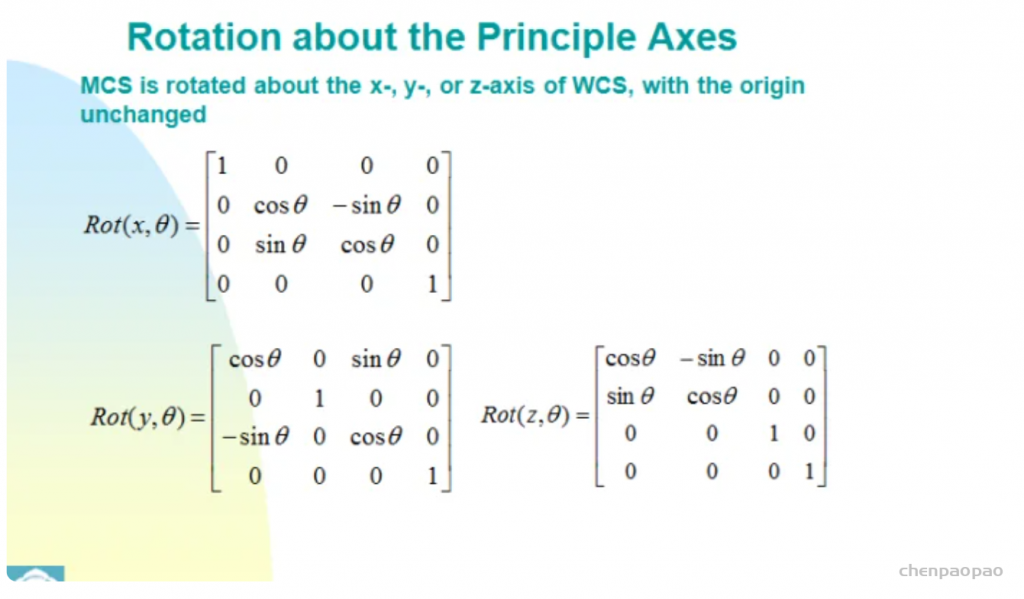
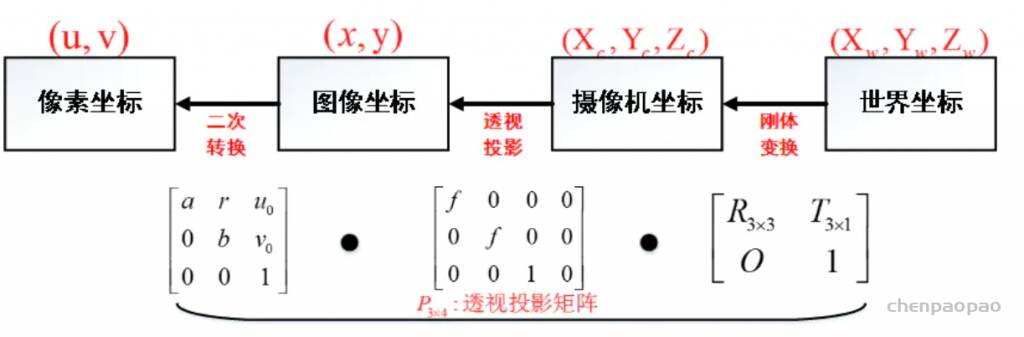
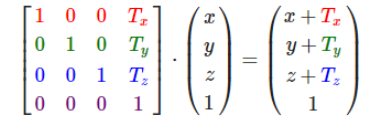
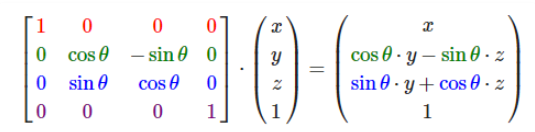
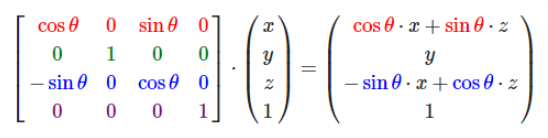
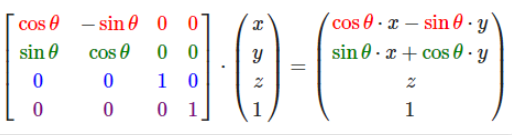
在图形学中,在做平移,旋转和缩放时,经常会用到矩阵,有缩放矩阵、平移矩阵和旋转矩阵。在三维空间中,变换矩阵都是一个四维矩阵,每一行分别表示x, y, z, w。
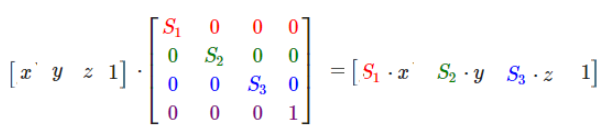
1. 缩放矩阵(scale)
上面的公式,左边的第一个操作数(四维矩阵)就是一个缩放矩阵,s1表示x轴的缩放倍数,s2表示y轴的缩放倍数,s3表示z轴的缩放倍数。第二个操作数表示空间中(x, y, z)点, w分量在缩放矩阵中没有用到,我们将其设为1。由右边的结果,可以看出(x, y, z)点经过缩放矩阵变换后,x、y、z分量都各自缩放了s(s1、s2、s3)倍。需要注意的是矩阵的乘法不具有交换律,这里点是用一维列矩阵表示的,作为矩阵乘法的右操作数。如果将其转换到乘法的左边,那么点应该用一维行矩阵表示: