转自:模型部署入门教程(五):ONNX 模型的修改与调试
一直以来,我们都是通过 PyTorch 来导出 ONNX 模型的,基本没有单独探究过 ONNX 模型的构造知识。
ONNX 的底层实现
ONNX 的存储格式
ONNX 在底层是用 Protobuf 定义的。Protobuf,全称 Protocol Buffer,是 Google 提出的一套表示和序列化数据的机制。使用 Protobuf 时,用户需要先写一份数据定义文件,再根据这份定义文件把数据存储进一份二进制文件。可以说,数据定义文件就是数据类,二进制文件就是数据类的实例。
message Person {
required string name = 1;
required int32 id = 2;
optional string email = 3;
} 这段定义表示在 Person 这种数据类型中,必须包含 name、id 这两个字段,选择性包含 email字段。根据这份定义文件,用户就可以选择一种编程语言,定义一个含有成员变量 name、id、email 的 Person 类,把这个类的某个实例用 Protobuf 存储成二进制文件;反之,用户也可以用二进制文件和对应的数据定义文件,读取出一个 Person 类的实例。开源库 ,这些文件定义了神经网络中模型、节点、张量的数据类型规范;而二进制文件就是我们熟悉的“.onnx”文件,每一个 onnx 文件按照数据定义规范,存储了一个神经网络的所有相关数据。直接用 Protobuf 生成 ONNX 模型还是比较麻烦的。幸运的是,ONNX 提供了很多实用 API,我们可以在完全不了解 Protobuf 的前提下,构造和读取 ONNX 模型。
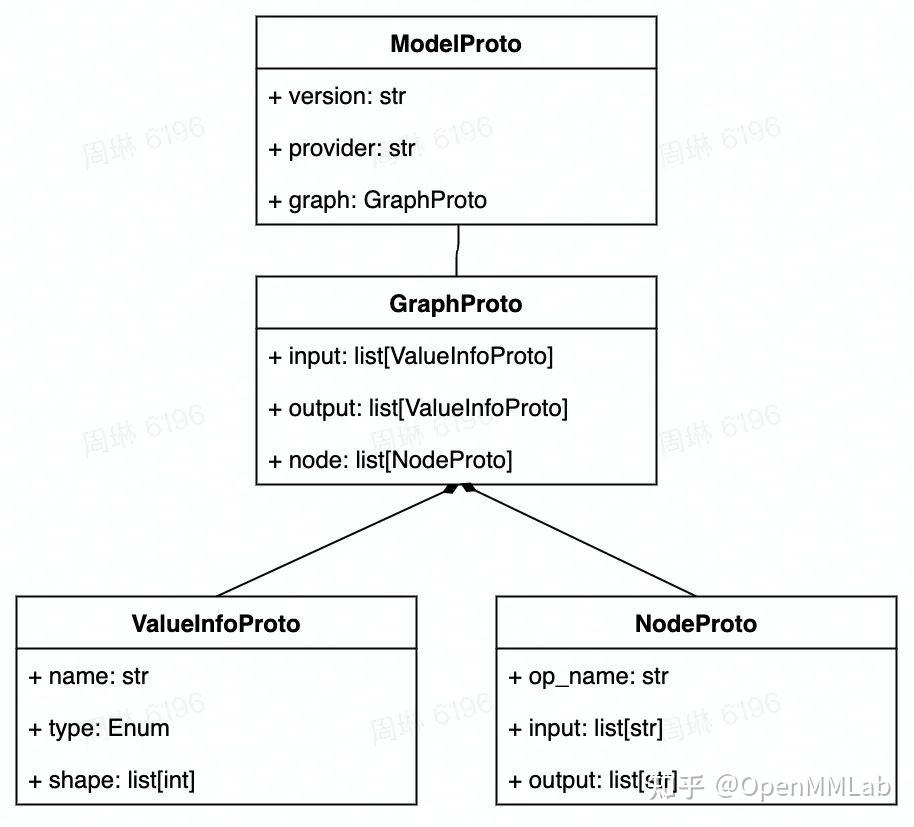
如图所示,一个 ONNX 模型可以用 ModelProto 类表示。ModelProto 包含了版本、创建者等日志信息,还包含了存储计算图结构的 graph。GraphProto 类则由输入张量信息、输出张量信息、节点信息组成。张量信息 ValueInfoProto 类包括张量名、基本数据类型、形状。节点信息 NodeProto 类包含了算子名、算子输入张量名、算子输出张量名。output=a*x+b 的 ONNX 模型 model,用 print(model) 可以输出以下内容:
ir_version: 8
graph {
node {
input: "a"
input: "x"
output: "c"
op_type: "Mul"
}
node {
input: "c"
input: "b"
output: "output"
op_type: "Add"
}
name: "linear_func"
input {
name: "a"
type {
tensor_type {
elem_type: 1
shape {
dim {dim_value: 10}
dim {dim_value: 10}
}
}
}
}
input {
name: "x"
type {
tensor_type {
elem_type: 1
shape {
dim {dim_value: 10}
dim {dim_value: 10}
}
}
}
}
input {
name: "b"
type {
tensor_type {
elem_type: 1
shape {
dim {dim_value: 10}
dim {dim_value: 10}
}
}
}
}
output {
name: "output"
type {
tensor_type {
elem_type: 1
shape {
dim { dim_value: 10}
dim { dim_value: 10}
}
}
}
}
}
opset_import {version: 15} 对应上文中的类图,这个模型的信息由 ir_version,opset_import 等全局信息和 graph 图信息组成。而 graph 包含一个乘法节点、一个加法节点、三个输入张量 a, x, b 以及一个输出张量 output。在下一节里,我们会用 API 构造出这个模型,并输出这段结果。
读写 ONNX 模型
构造 ONNX 模型
现在,让我们抛开 PyTorch,尝试完全用 ONNX 的 Python API 构造一个描述线性函数 output=a*x+b 的 ONNX 模型。我们将根据上面的结构,自底向上地构造这个模型。helper.make_tensor_value_info 构造出一个描述张量信息的 ValueInfoProto 对象。如前面的类图所示,我们要传入张量名、张量的基本数据类型、张量形状这三个信息。在 ONNX 中,不管是输入张量还是输出张量,它们的表示方式都是一样的。因此,这里我们用类似的方式为三个输入 a, x, b 和一个输出 output 构造 ValueInfoProto 对象。如下面的代码所示:
import onnx
from onnx import helper
from onnx import TensorProto
a = helper.make_tensor_value_info('a', TensorProto.FLOAT, [10, 10])
x = helper.make_tensor_value_info('x', TensorProto.FLOAT, [10, 10])
b = helper.make_tensor_value_info('b', TensorProto.FLOAT, [10, 10])
output = helper.make_tensor_value_info('output', TensorProto.FLOAT, [10, 10]) 之后,我们要构造算子节点信息 NodeProto,这可以通过在 helper.make_node 中传入算子类型、输入算子名、输出算子名这三个信息来实现。我们这里先构造了描述 c=a*x 的乘法节点,再构造了 output=c+b 的加法节点。如下面的代码所示:
mul = helper.make_node('Mul', ['a', 'x'], ['c'])
add = helper.make_node('Add', ['c', 'b'], ['output']) 在计算机中,图一般是用一个节点集和一个边集表示的。而 ONNX 巧妙地把边的信息保存在了节点信息里,省去了保存边集的步骤。在 ONNX 中,如果某节点的输入名和之前某节点的输出名相同,就默认这两个节点是相连的。如上面的例子所示:Mul 节点定义了输出 c,Add 节点定义了输入 c,则 Mul 节点和 Add 节点是相连的。a, x, b 中的某个输入节点从计算图中拿出(这个操作会在之后的代码中介绍),或者把 Mul 的输出从 c 改成 d,则最终的 ONNX 模型都是不满足标准的。
一个不满足标准的 ONNX 模型可能无法被推理引擎正确识别。ONNX 提供了 API onnx.checker.check_model 来判断一个 ONNX 模型是否满足标准。
接下来,我们用 helper.make_graph 来构造计算图 GraphProto。helper.make_graph 函数需要传入节点、图名称、输入张量信息、输出张量信息这 4 个参数。如下面的代码所示,我们把之前构造出来的 NodeProto 对象和 ValueInfoProto 对象按照顺序传入即可。
graph = helper.make_graph([mul, add], 'linear_func', [a, x, b], [output]) 这里 make_graph 的节点参数有一个要求:计算图的节点必须以拓扑序给出。
拓扑序是与有向图的相关的数学概念。如果按拓扑序遍历所有节点的话,能保证每个节点的输入都能在之前节点的输出里找到(对于 ONNX 模型,我们把计算图的输入张量也看成“之前的输出”)。
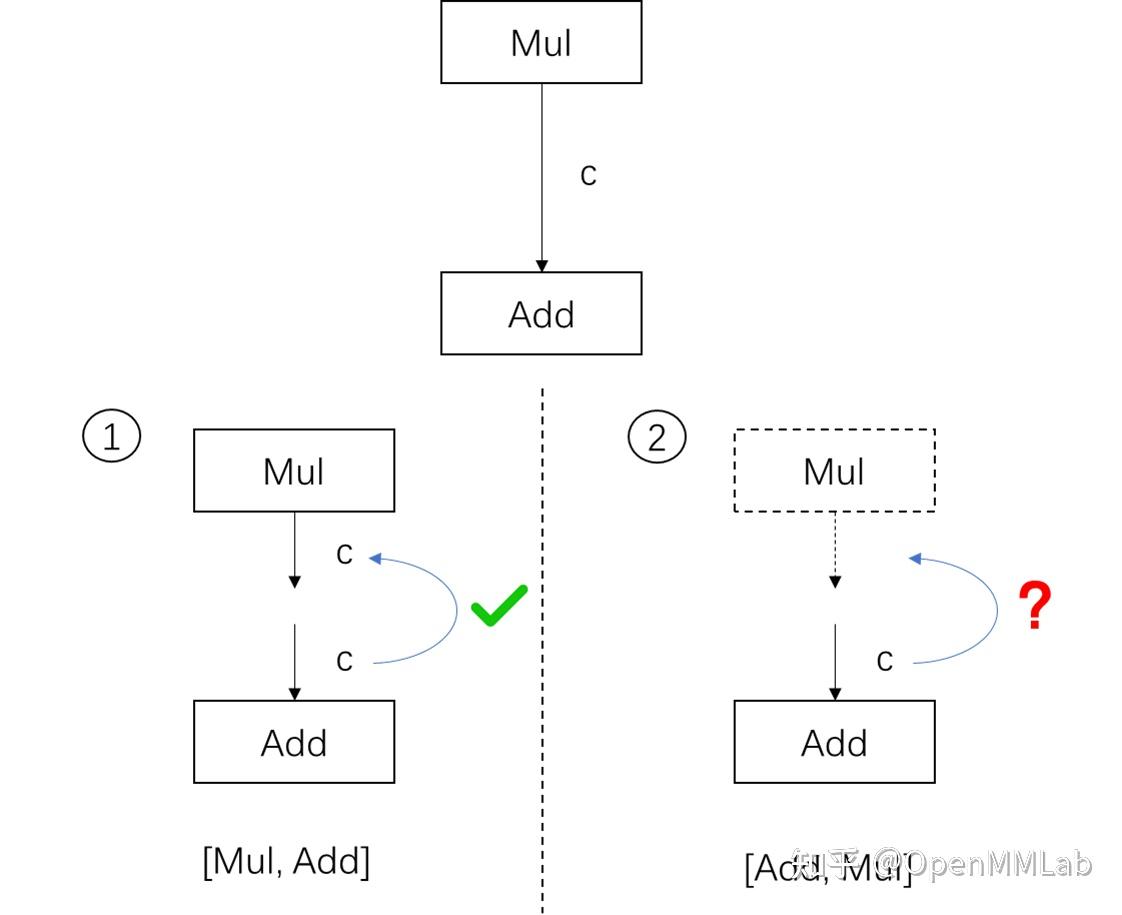
如果对这个概念不熟也没有关系,我们以刚刚构造出来的这个计算图为研究对象,通过下图展示的两个例子来直观理解拓扑序。
这里我们只关注 Mul 和 Add 节点以及它们之间的边 c。在情况 1 中:如果我们的节点以 [Mul, Add] 顺序给出,那么遍历到 Add 时,它的输入 c 可以在之前的Mul的输出中找到。但是,如情况 2 所示:如果我们的节点以 [Add, Mul] 的顺序给出,那么 Add 就找不到输入边,计算图也无法成功构造出来了。这里的 [Mul, Add] 就是符合有向图的拓扑序的,而 [Add, Mul] 则不满足。
最后,我们用 helper.make_model 把计算图 GraphProto 封装进模型 ModelProto 里,一个 ONNX 模型就构造完成了。make_model 函数中还可以添加模型制作者、版本等信息,为了简单起见,我们没有添加额外的信息。如下面的代码所示:
model = helper.make_model(graph) 构造完模型之后,我们用下面这三行代码来检查模型正确性、把模型以文本形式输出、存储到一个 “.onnx” 文件里。这里用 onnx.checker.check_model 来检查模型是否满足 ONNX 标准是必要的,因为无论模型是否满足标准,ONNX 都允许我们用 onnx.save 存储模型。我们肯定不希望生成一个不满足标准的模型。
onnx.checker.check_model(model)
print(model)
onnx.save(model, 'linear_func.onnx') 成功执行这些代码的话,程序会以文本格式输出模型的信息,其内容应该和我们在上一节展示的输出一样。
import onnx
from onnx import helper
from onnx import TensorProto
# input and output
a = helper.make_tensor_value_info('a', TensorProto.FLOAT, [10, 10])
x = helper.make_tensor_value_info('x', TensorProto.FLOAT, [10, 10])
b = helper.make_tensor_value_info('b', TensorProto.FLOAT, [10, 10])
output = helper.make_tensor_value_info('output', TensorProto.FLOAT, [10, 10])
# Mul
mul = helper.make_node('Mul', ['a', 'x'], ['c'])
# Add
add = helper.make_node('Add', ['c', 'b'], ['output'])
# graph and model
graph = helper.make_graph([mul, add], 'linear_func', [a, x, b], [output])
model = helper.make_model(graph)
# save model
onnx.checker.check_model(model)
print(model)
onnx.save(model, 'linear_func.onnx') 老规矩,我们可以用 ONNX Runtime 运行模型,来看看模型是否正确:
import onnxruntime
import numpy as np
sess = onnxruntime.InferenceSession('linear_func.onnx')
a = np.random.rand(10, 10).astype(np.float32)
b = np.random.rand(10, 10).astype(np.float32)
x = np.random.rand(10, 10).astype(np.float32)
output = sess.run(['output'], {'a': a, 'b': b, 'x': x})[0]
assert np.allclose(output, a * x + b) 一切顺利的话,这段代码不会有任何报错信息。这说明我们的模型等价于执行 a * x + b 这个计算。
通过用 API 构造 ONNX 模型,我们已经彻底搞懂了 ONNX 由哪些模块组成。现在,让我们看看该如何读取现有的”.onnx”文件并从中提取模型信息。
import onnx
model = onnx.load('linear_func.onnx')
print(model) 之前在输出模型时,我们传给 onnx.save 的是一个 ModelProto 的对象。同理,用上面的 onnx.load 读取 ONNX 模型时,我们收获的也是一个 ModelProto 的对象。输出这个对象后,我们应该得到和之前完全相同的输出。GraphProto、节点 NodeProto、张量信息 ValueInfoProto 读取出来:
graph = model.graph
node = graph.node
input = graph.input
output = graph.output
print(node)
print(input)
print(output) 使用如上这些代码,我们可以分别访问模型的图、节点、张量信息。这里大家或许会有疑问:该怎样找出 graph.node,graph.input 中 node, input 这些属性名称呢?其实,属性的名称就写在每个对象的输出里。我们以 print(node) 的输出为例:
[input: "a"
input: "x"
output: "c"
op_type: "Mul"
, input: "c"
input: "b"
output: "output"
op_type: "Add"
] 在这段输出中,我们能看出 node 其实就是一个列表,列表中的对象有属性 input, output, op_type(这里 input 也是一个列表,它包含的两个元素都显示出来了)。我们可以用下面的代码来获取 node 里第一个节点 Mul 的属性:
node_0 = node[0]
node_0_inputs = node_0.input
node_0_outputs = node_0.output
input_0 = node_0_inputs[0]
input_1 = node_0_inputs[1]
output = node_0_outputs[0]
op_type = node_0.op_type
print(input_0)
print(input_1)
print(output)
print(op_type)
# Output
"""
a
x
c
Mul
""" 当我们想知道 ONNX 模型某数据对象有哪些属性时,我们不必去翻 ONNX 文档,只需要先把数据对象输出一下,然后在输出结果找出属性名即可。
import onnx
model = onnx.load('linear_func.onnx')
node = model.graph.node
node[1].op_type = 'Sub'
onnx.checker.check_model(model)
onnx.save(model, 'linear_func_2.onnx') 在读入之前的 linear_func.onnx 模型后,我们可以直接修改第二个节点的类型 node[1].op_type,把加法变成减法。这样,我们的模型描述的是 a * x - b 这个线性函数。大家感兴趣的话,可以用 ONNX Runtime 运行新模型 linear_func_2.onnx,来验证一下它和 a * x - b 是否等价。
调试 ONNX 模型
在实际部署中,如果用深度学习框架导出的 ONNX 模型出了问题,一般要通过修改框架的代码来解决,而不会从 ONNX 入手,我们把 ONNX 模型当成一个不可修改的黑盒看待。
子模型提取
ONNX 官方为开发者提供了子模型提取(extract)的功能。子模型提取,顾名思义,就是从一个给定的 ONNX 模型中,拿出一个子模型。这个子模型的节点集、边集都是原模型中对应集合的子集。让我们来用 PyTorch 导出一个复杂一点的 ONNX 模型,并在它的基础上执行提取操作:
import torch
class Model(torch.nn.Module):
def __init__(self):
super().__init__()
self.convs1 = torch.nn.Sequential(torch.nn.Conv2d(3, 3, 3),
torch.nn.Conv2d(3, 3, 3),
torch.nn.Conv2d(3, 3, 3))
self.convs2 = torch.nn.Sequential(torch.nn.Conv2d(3, 3, 3),
torch.nn.Conv2d(3, 3, 3))
self.convs3 = torch.nn.Sequential(torch.nn.Conv2d(3, 3, 3),
torch.nn.Conv2d(3, 3, 3))
self.convs4 = torch.nn.Sequential(torch.nn.Conv2d(3, 3, 3),
torch.nn.Conv2d(3, 3, 3),
torch.nn.Conv2d(3, 3, 3))
def forward(self, x):
x = self.convs1(x)
x1 = self.convs2(x)
x2 = self.convs3(x)
x = x1 + x2
x = self.convs4(x)
return x
model = Model()
input = torch.randn(1, 3, 20, 20)
torch.onnx.export(model, input, 'whole_model.onnx')
在前面的章节中,我们学过,ONNX 的边用同名张量表示的。也就是说,这里的边序号,实际上是前一个节点的输出张量序号和后一个节点的输入张量序号。由于这个模型是用 PyTorch 导出的,这些张量序号都是 PyTorch 自动生成的。
import onnx
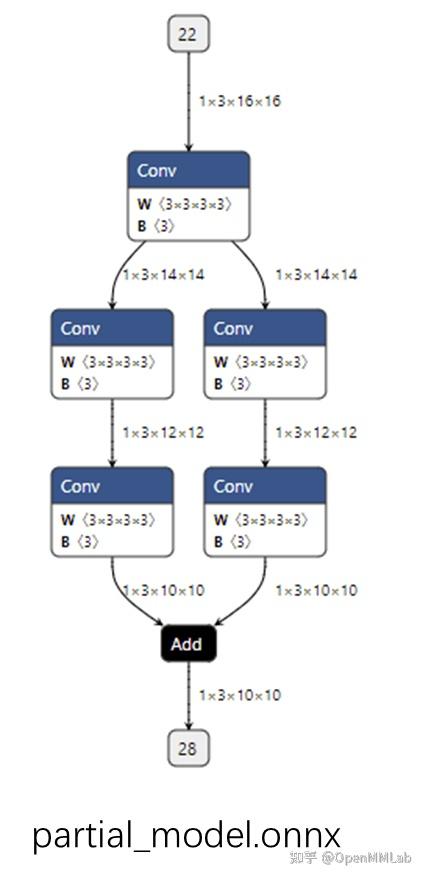
onnx.utils.extract_model('whole_model.onnx', 'partial_model.onnx', ['22'], ['28']) 子模型的可视化结果如下图所示:
通过观察代码和输出图,应该不难猜出这段代码的作用是把原计算图从边 22 到边 28 的子图提取出来,并组成一个子模型。onnx.utils.extract_model 就是完成子模型提取的函数,它的参数分别是原模型路径、输出模型路径、子模型的输入边(输入张量)、子模型的输出边(输出张量)。whole_model.onnx, 我们来看一看三个子模型提取的示例。
添加额外输出
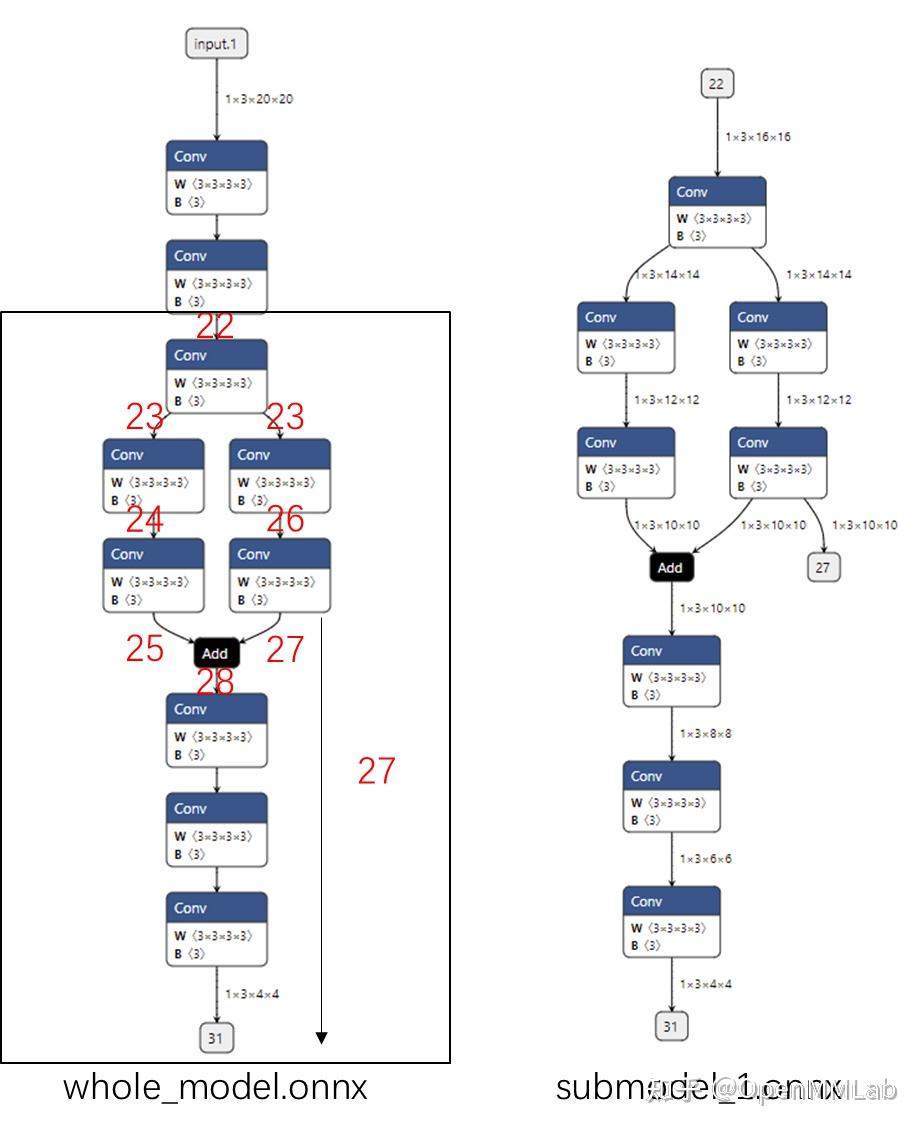
我们在提取时新设定了一个输出张量,如下面的代码所示:
onnx.utils.extract_model('whole_model.onnx', 'submodel_1.onnx', ['22'], ['27', '31']) 我们可以看到子模型会添加一条把张量输出的新边,如下图所示:
添加冗余输入
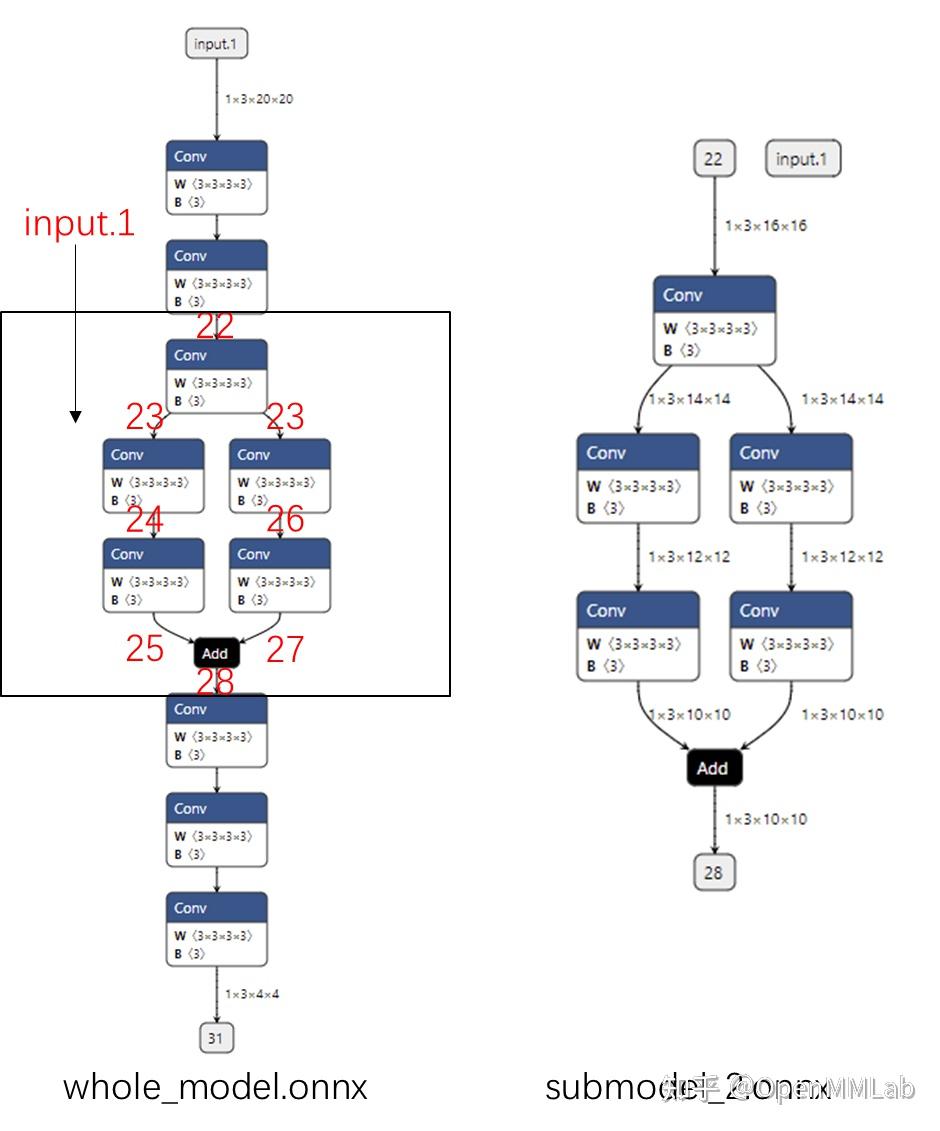
如果我们还是像开始一样提取边 22 到边 28 之间的子模型,但是多添加了一个输入 input.1,那么提取出的子模型会有一个冗余的输入 input.1,如下面的代码所示:
onnx.utils.extract_model('whole_model.onnx', 'submodel_2.onnx', ['22', 'input.1'], ['28']) 从下图可以看到:无论给这个输入传入什么值,都不会影响子模型的输出。可以认为如果只用子模型的部分输入就能得到输出,那么那些”较早“的多出来的输入就是冗余的。
输入信息不足
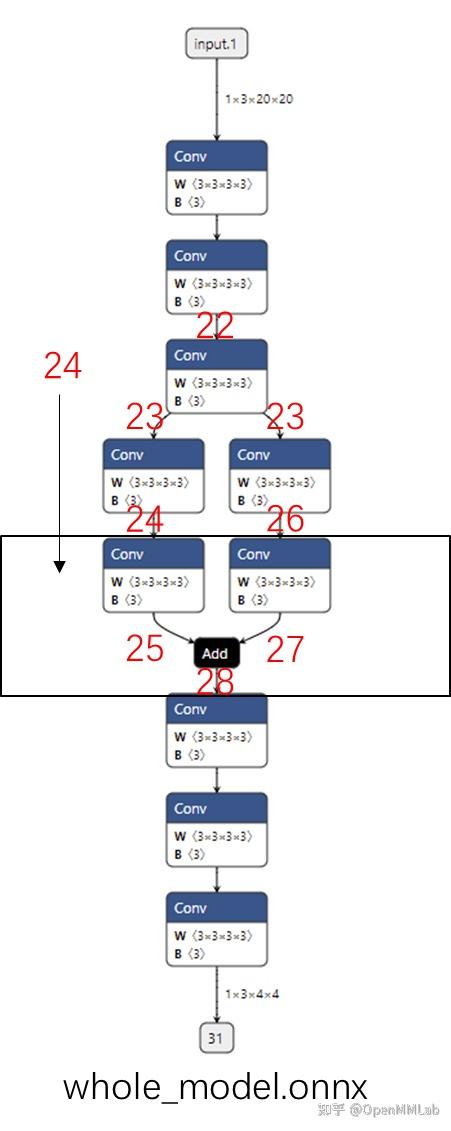
这次,我们尝试提取的子模型输入是边 24,输出是边 28。如下面的代码和图所示:
# Error
onnx.utils.extract_model('whole_model.onnx', 'submodel_3.onnx', ['24'], ['28']) 从图中可以看出,想通过边 24 计算边 28 的结果,至少还需要输入边 26,或者更上面的边。仅凭借边 24 是无法计算出边 28 的结果的,因此这样提取子模型会报错。
输出 ONNX 中间节点的值
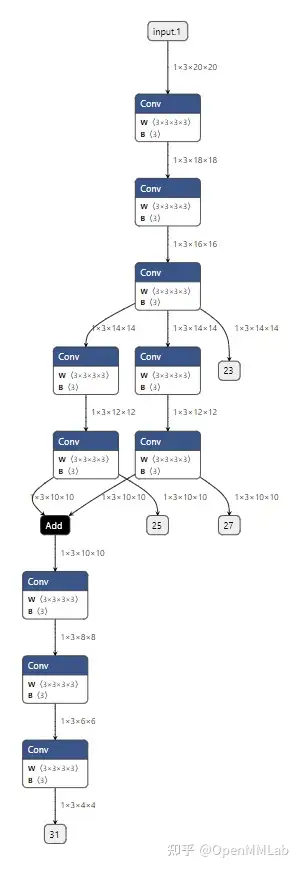
在使用 ONNX 模型时,最常见的一个需求是能够用推理引擎输出中间节点的值。这多见于深度学习框架模型和 ONNX 模型的精度对齐中,因为只要能够输出中间节点的值,就能定位到精度出现偏差的算子。我们来看看如何用子模型提取实现这一任务。
onnx.utils.extract_model('whole_model.onnx', 'more_output_model.onnx', ['input.1'], ['31', '23', '25', '27'])在这个子模型中,我们在保持原有的输入 input.1,输出 31 的同时,把其他几个边加入了输出中。如下图所示:
这样,用 ONNX Runtime 运行 more_output_model.onnx 这个模型时,我们就能得到更多的输出了。
onnx.utils.extract_model('whole_model.onnx', 'debug_model_1.onnx', ['input.1'], ['23'])
onnx.utils.extract_model('whole_model.onnx', 'debug_model_2.onnx', ['23'], ['25'])
onnx.utils.extract_model('whole_model.onnx', 'debug_model_3.onnx', ['23'], ['27'])
onnx.utils.extract_model('whole_model.onnx', 'debug_model_4.onnx', ['25', '27'], ['31']) 在这个例子中,我们把原来较为复杂的模型拆成了四个较为简单的子模型,如下图所示。在调试时,我们可以先调试顶层的子模型,确认顶层子模型无误后,把它的输出做为后面子模型的输入。
子模型提取固然是一个便利的 ONNX 调试工具。但是,在实际的情况中,我们一般是用 PyTorch 等框架导出 ONNX 模型。这里有两个问题:
一旦 PyTorch 模型改变,ONNX 模型的边序号也会改变。这样每次提取同样的子模块时都要重新去 ONNX 模型里查序号,如此繁琐的调试方法是不会在实践中采用的。 即使我们能保证 ONNX 的边序号不发生改变,我们也难以把 PyTorch 代码和 ONNX 节点对应起来——当模型结构变得十分复杂时,要识别 ONNX 中每个节点的含义是不可能的。