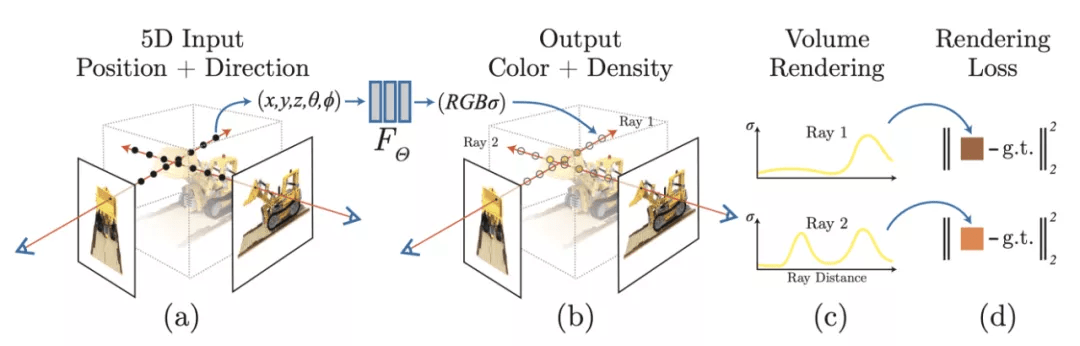
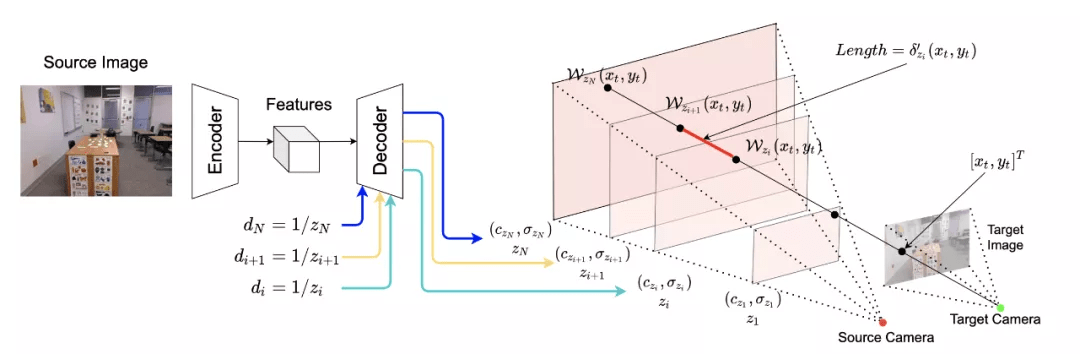
结合了NeRF和Multiplane Image(MPI),提出了一种新的三维空间表达方式MINE。MINE利用了NeRF的思路,将MPI扩展成了连续深度的形式。输入单张RGB图片,我们的方法会对source相机的视锥(frustum)做稠密的三维重建,同时对被遮挡的部分做inpainting,预测出相机视锥的三维表达。利用这个三维表达,给出target相机相对于source相机的在三维空间中的相对位置和角度变化(rotation and translation),我们可以方便且高效地渲染出在目标相机视图下的RGB图片以及深度图。
[1]. Tinghui Zhou, Richard Tucker, John Flynn, Graham Fyffe, Noah Snavely. Stereo Magnification: Learning View Synthesis using Multiplane Images. (SIGGRAPH 2018)
[2]. Ben Mildenhall, Pratul P. Srinivasan, Rodrigo Ortiz-Cayon, Nima Khademi Kalantari, Ravi Ramamoorthi, Ren Ng, Abhishek Kar. Local Light Field Fusion: Practical View Synthesis with Prescriptive Sampling Guidelines. (SIGGRAPH 2019)
[3]. Richard Tucker, Noah Snavely. Single-View View Synthesis with Multiplane Images. (CVPR 2020)
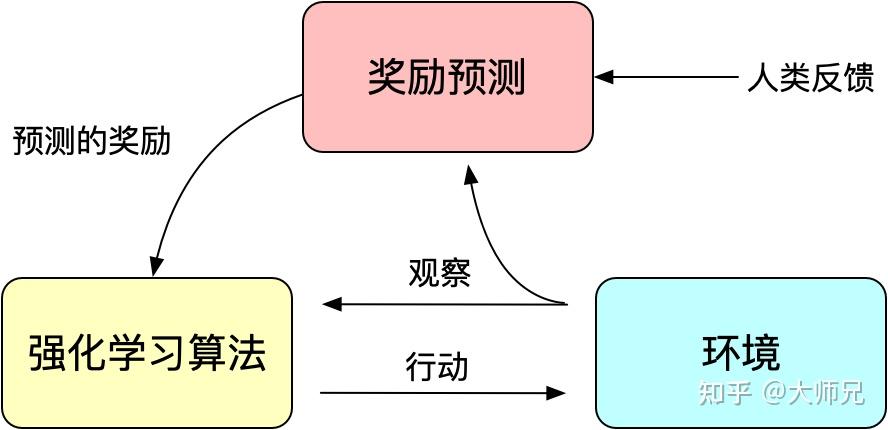
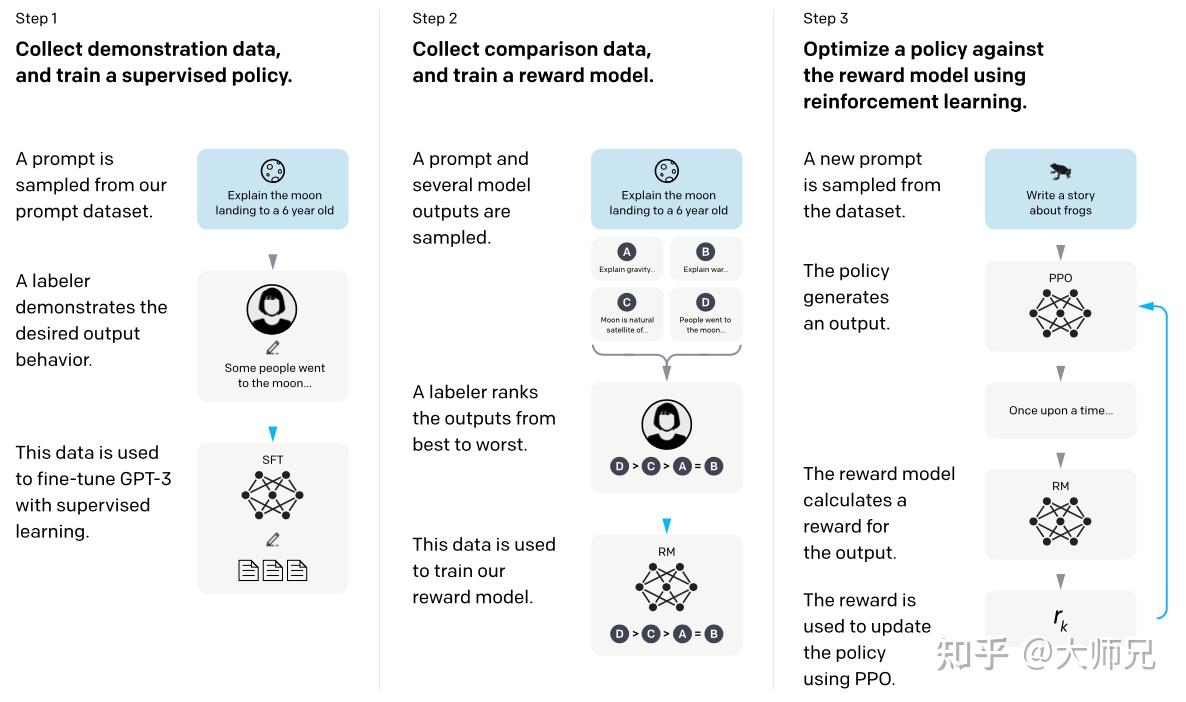
最近非常火的ChatGPT和今年年初公布的[1]是一对姐妹模型,是在GPT-4之前发布的预热模型,有时候也被叫做GPT3.5。ChatGPT和InstructGPT在模型结构,训练方式上都完全一致,即都使用了指示学习(Instruction Learning)和人工反馈的强化学习(Reinforcement Learning from Human Feedback,RLHF)来指导模型的训练,它们不同的仅仅是采集数据的方式上有所差异。所以要搞懂ChatGPT,我们必须要先读懂InstructGPT。
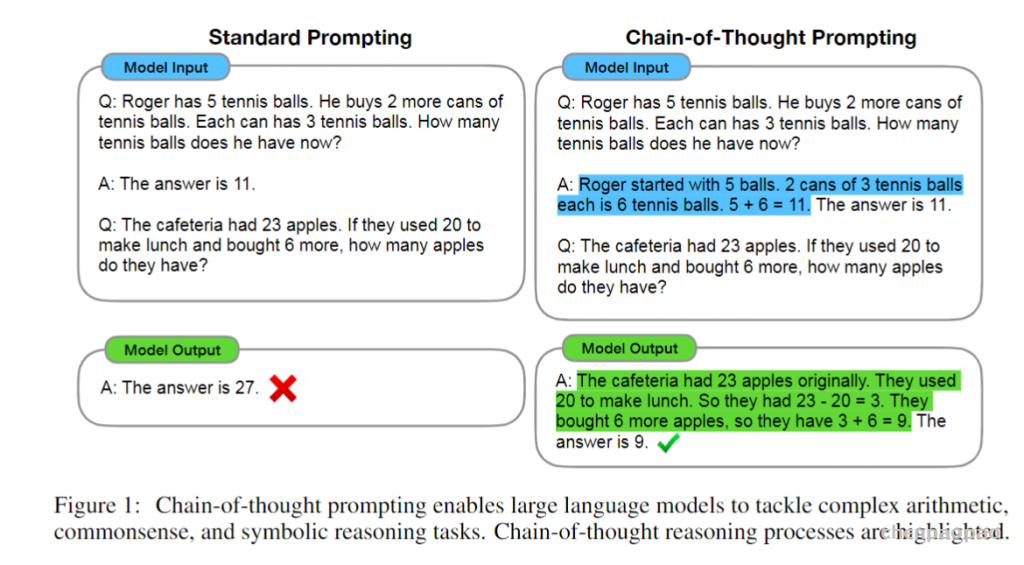
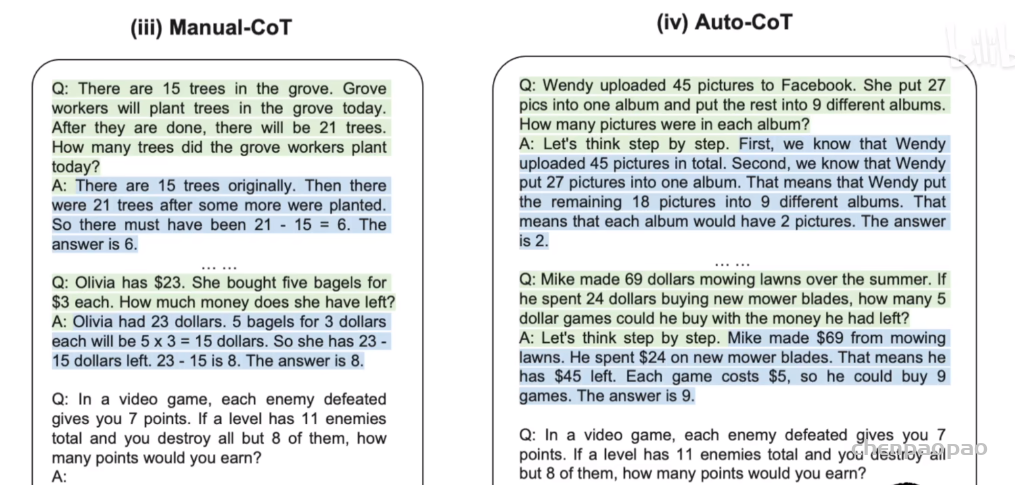
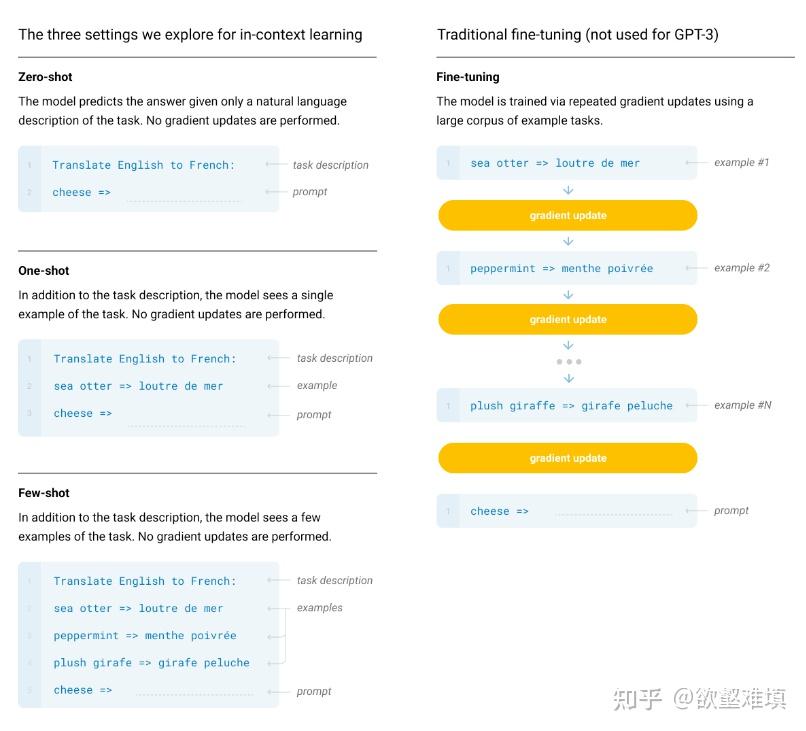
指示学习是谷歌Deepmind的Quoc V.Le团队在2021年的一篇名为《Finetuned Language Models Are Zero-Shot Learners》[5]文章中提出的思想。指示学习和提示学习的目的都是去挖掘语言模型本身具备的知识。不同的是Prompt是激发语言模型的补全能力,例如根据上半句生成下半句,或是完形填空等。Instruct是激发语言模型的理解能力,它通过给出更明显的指令,让模型去做出正确的行动。我们可以通过下面的例子来理解这两个不同的学习方式:
^Ouyang, Long, et al. “Training language models to follow instructions with human feedback.” *arXiv preprint arXiv:2203.02155* (2022). https://arxiv.org/pdf/2203.02155.pdf
^Wei, Jason, et al. “Finetuned language models are zero-shot learners.” *arXiv preprint arXiv:2109.01652* (2021). https://arxiv.org/pdf/2109.01652.pdf
^Christiano, Paul F., et al. “Deep reinforcement learning from human preferences.” *Advances in neural information processing systems* 30 (2017). https://arxiv.org/pdf/1706.03741.pdf
# 类的定义
class Embedding(nn.Module):
def __init__(self, in_channels, N_freqs, logscale=True):
"""
Defines a function that embeds x to (x, sin(2^k x), cos(2^k x), ...)
in_channels: number of input channels (3 for both xyz and direction)
"""
super(Embedding, self).__init__()
self.N_freqs = N_freqs
self.in_channels = in_channels
self.funcs = [torch.sin, torch.cos]
self.out_channels = in_channels*(len(self.funcs)*N_freqs+1)
if logscale:
self.freq_bands = 2**torch.linspace(0, N_freqs-1, N_freqs)
else:
self.freq_bands = torch.linspace(1, 2**(N_freqs-1), N_freqs)
def forward(self, x):
"""
Embeds x to (x, sin(2^k x), cos(2^k x), ...)
Different from the paper, "x" is also in the output
See https://github.com/bmild/nerf/issues/12
Inputs:
x: (B, self.in_channels)
Outputs:
out: (B, self.out_channels)
"""
out = [x]
for freq in self.freq_bands:
for func in self.funcs:
out += [func(freq*x)]
return torch.cat(out, -1)
# 使用
class NeRFSystem(LightningModule):
def __init__(self, hparams):
...
self.embedding_xyz = Embedding(3, 10) # 10 is the default number
self.embedding_dir = Embedding(3, 4) # 4 is the default number
self.embeddings = [self.embedding_xyz, self.embedding_dir]
...
解释
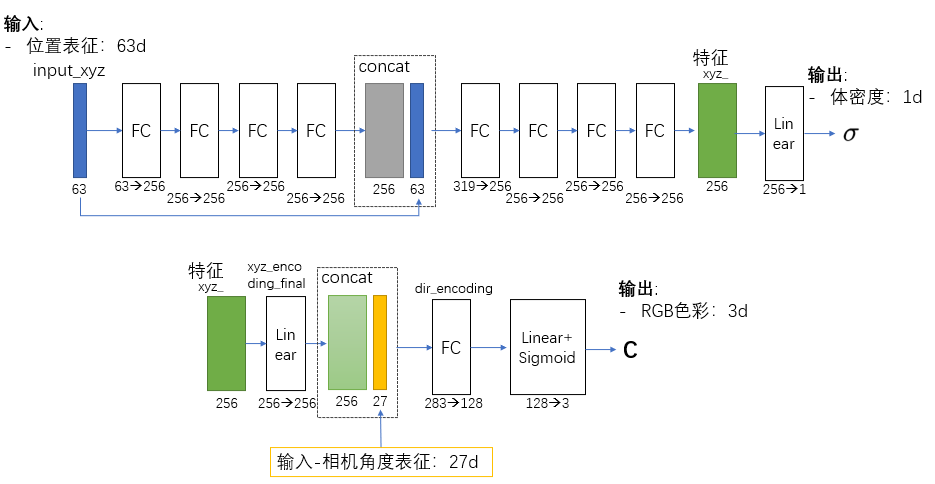
对于位置坐标 (x,y,z), 每一个值都使用 10 个 sin 和 10 个cos 频率进行拓展。例如 Embeds x to (x, sin (2^k x), cos (2^k x), …) 。再连接一个本身。因此每一个值都拓展为 10+10+1=21维。对于位置坐标的三个值,总共有 3×21=63 维。
class NeRF(nn.Module):
def __init__(self,
D=8, W=256,
in_channels_xyz=63, in_channels_dir=27,
skips=[4]):
"""
D: number of layers for density (sigma) encoder
W: number of hidden units in each layer
in_channels_xyz: number of input channels for xyz (3+3*10*2=63 by default)
in_channels_dir: number of input channels for direction (3+3*4*2=27 by default)
skips: add skip connection in the Dth layer
"""
super(NeRF, self).__init__()
self.D = D
self.W = W
self.in_channels_xyz = in_channels_xyz
self.in_channels_dir = in_channels_dir
self.skips = skips
# xyz encoding layers
for i in range(D):
if i == 0:
layer = nn.Linear(in_channels_xyz, W)
elif i in skips:
layer = nn.Linear(W+in_channels_xyz, W)
else:
layer = nn.Linear(W, W)
layer = nn.Sequential(layer, nn.ReLU(True))
setattr(self, f"xyz_encoding_{i+1}", layer)
self.xyz_encoding_final = nn.Linear(W, W)
# direction encoding layers
self.dir_encoding = nn.Sequential(
nn.Linear(W+in_channels_dir, W//2),
nn.ReLU(True))
# output layers
self.sigma = nn.Linear(W, 1)
self.rgb = nn.Sequential(
nn.Linear(W//2, 3),
nn.Sigmoid())
def forward(self, x, sigma_only=False):
"""
Encodes input (xyz+dir) to rgb+sigma (not ready to render yet).
For rendering this ray, please see rendering.py
Inputs:
x: (B, self.in_channels_xyz(+self.in_channels_dir))
the embedded vector of position and direction
sigma_only: whether to infer sigma only. If True,
x is of shape (B, self.in_channels_xyz)
Outputs:
if sigma_ony:
sigma: (B, 1) sigma
else:
out: (B, 4), rgb and sigma
"""
if not sigma_only:
input_xyz, input_dir = \
torch.split(x, [self.in_channels_xyz, self.in_channels_dir], dim=-1)
else:
input_xyz = x
xyz_ = input_xyz
for i in range(self.D):
if i in self.skips:
xyz_ = torch.cat([input_xyz, xyz_], -1)
xyz_ = getattr(self, f"xyz_encoding_{i+1}")(xyz_)
sigma = self.sigma(xyz_)
if sigma_only:
return sigma
xyz_encoding_final = self.xyz_encoding_final(xyz_)
dir_encoding_input = torch.cat([xyz_encoding_final, input_dir], -1)
dir_encoding = self.dir_encoding(dir_encoding_input)
rgb = self.rgb(dir_encoding)
out = torch.cat([rgb, sigma], -1)
return out
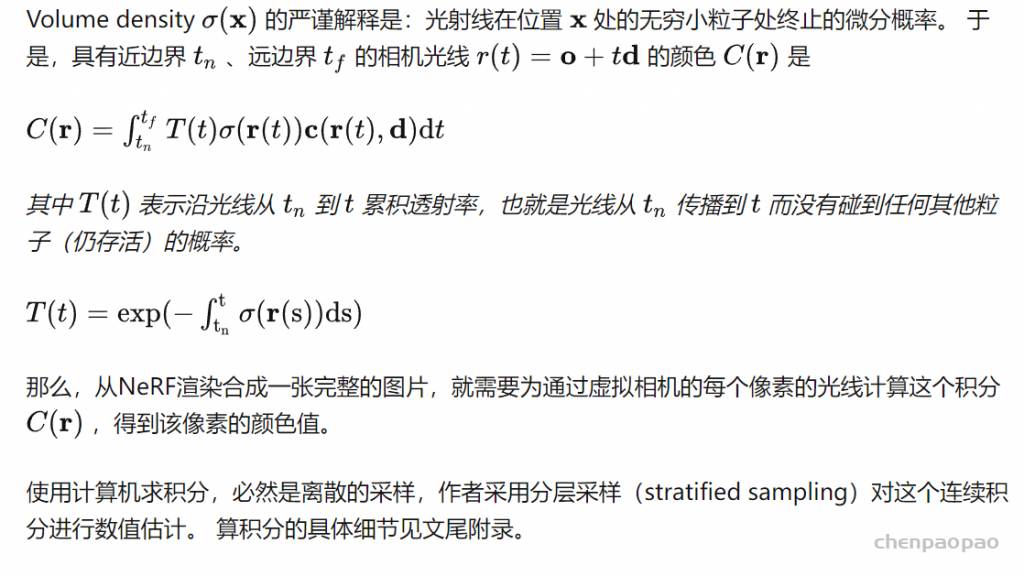
# z_vals: (N_rays, N_samples_) depths of the sampled positions
# noise_std: factor to perturb the model's prediction of sigma(提升模型鲁棒性??)
# Convert these values using volume rendering (Section 4)
deltas = z_vals[:, 1:] - z_vals[:, :-1] # (N_rays, N_samples_-1)
delta_inf = 1e10 * torch.ones_like(deltas[:, :1]) # (N_rays, 1) the last delta is infinity
deltas = torch.cat([deltas, delta_inf], -1) # (N_rays, N_samples_)
# Multiply each distance by the norm of its corresponding direction ray
# to convert to real world distance (accounts for non-unit directions).
deltas = deltas * torch.norm(dir_.unsqueeze(1), dim=-1)
noise = torch.randn(sigmas.shape, device=sigmas.device) * noise_std
# compute alpha by the formula (3)
alphas = 1-torch.exp(-deltas*torch.relu(sigmas+noise)) # (N_rays, N_samples_)
alphas_shifted = \
torch.cat([torch.ones_like(alphas[:, :1]), 1-alphas+1e-10], -1) # [1, a1, a2, ...]
weights = \
alphas * torch.cumprod(alphas_shifted, -1)[:, :-1] # (N_rays, N_samples_)
weights_sum = weights.sum(1) # (N_rays), the accumulated opacity along the rays
# equals "1 - (1-a1)(1-a2)...(1-an)" mathematically
if weights_only:
return weights
# compute final weighted outputs
rgb_final = torch.sum(weights.unsqueeze(-1)*rgbs, -2) # (N_rays, 3)
depth_final = torch.sum(weights*z_vals, -1) # (N_rays)
第二轮渲染
对于渲染的结果,会根据 对应的权重,使用 pdf 抽样,得到新的渲染点。例如默认第一轮粗渲染每束光线是 64 个样本点,第二轮再增加 128 个抽样点。
然后使用 finemodel 进行预测,后对所有的样本点(64+128)进行体素渲染。
def sample_pdf(bins, weights, N_importance, det=False, eps=1e-5):
"""
Sample @N_importance samples from @bins with distribution defined by @weights.
Inputs:
bins: (N_rays, N_samples_+1) where N_samples_ is "the number of coarse samples per ray - 2"
weights: (N_rays, N_samples_)
N_importance: the number of samples to draw from the distribution
det: deterministic or not
eps: a small number to prevent division by zero
Outputs:
samples: the sampled samples
"""
N_rays, N_samples_ = weights.shape
weights = weights + eps # prevent division by zero (don't do inplace op!)
pdf = weights / torch.sum(weights, -1, keepdim=True) # (N_rays, N_samples_)
cdf = torch.cumsum(pdf, -1) # (N_rays, N_samples), cumulative distribution function
cdf = torch.cat([torch.zeros_like(cdf[: ,:1]), cdf], -1) # (N_rays, N_samples_+1)
# padded to 0~1 inclusive
if det:
u = torch.linspace(0, 1, N_importance, device=bins.device)
u = u.expand(N_rays, N_importance)
else:
u = torch.rand(N_rays, N_importance, device=bins.device)
u = u.contiguous()
inds = searchsorted(cdf, u, side='right')
below = torch.clamp_min(inds-1, 0)
above = torch.clamp_max(inds, N_samples_)
inds_sampled = torch.stack([below, above], -1).view(N_rays, 2*N_importance)
cdf_g = torch.gather(cdf, 1, inds_sampled).view(N_rays, N_importance, 2)
bins_g = torch.gather(bins, 1, inds_sampled).view(N_rays, N_importance, 2)
denom = cdf_g[...,1]-cdf_g[...,0]
denom[denom<eps] = 1 # denom equals 0 means a bin has weight 0, in which case it will not be sampled
# anyway, therefore any value for it is fine (set to 1 here)
samples = bins_g[...,0] + (u-cdf_g[...,0])/denom * (bins_g[...,1]-bins_g[...,0])
return samples
Loss
这里直接使用的 MSE loss,对输出的像素值和 ground truth 计算 L2-norm loss.
拍摄角度信息(从 COLMAP 生成):Nimg×17。前 15 维可以变形为 3×5,代表了相机的 pose,后 2 维是最近和最远的深度。解释: 3×5 pose matrices and 2 depth bounds for each image. Each pose has [R T] as the left 3×4 matrix and [H W F] as the right 3×1 matrix. R matrix is in the form [down right back] instead of [right up back] . (https://github.com/bmild/nerf/issues/34)
# "datasets/llff.py", line:188
# Step 1: rescale focal length according to training resolution
H, W, self.focal = poses[0, :, -1] # original intrinsics, same for all images
assert H*self.img_wh[0] == W*self.img_wh[1], \
f'You must set @img_wh to have the same aspect ratio as ({W}, {H}) !'
self.focal *= self.img_wh[0]/W
第二步:调整 pose 的方向。在 “poses_bounds.npy” 中,pose 的方向是 “下右后”,我们调整到 “右上后”。同时使用 “center_poses(poses)” 函数,对整个 dataset 的坐标轴进行标准化(??)。 解释:“poses_avg computes a “central” pose for the dataset, based on using the mean translation, the mean z axis, and adopting the mean y axis as an “up” direction (so that Up x Z = X and then Z x X = Y). recenter_poses very simply applies the inverse of this average pose to the dataset (a rigid rotation/translation) so that the identity extrinsic matrix is looking at the scene, which is nice because normalizes the orientation of the scene for later rendering from the learned NeRF. This is also important for using NDC (Normalized device coordinates) coordinates, since we assume the scene is centered there too.”(https://github.com/bmild/nerf/issues/34)
# "datasets/llff.py", line:195
# Step 2: correct poses
# Original poses has rotation in form "down right back", change to "right up back"
# See https://github.com/bmild/nerf/issues/34
poses = np.concatenate([poses[..., 1:2], -poses[..., :1], poses[..., 2:4]], -1)
# (N_images, 3, 4) exclude H, W, focal
self.poses, self.pose_avg = center_poses(poses)
第三步:令最近的距离约为 1。 解释:“The NDC code takes in a “near” bound and assumes the far bound is infinity (this doesn’t matter too much since NDC space samples in 1/depth so moving from “far” to infinity is only slightly less sample-efficient). You can see here that the “near” bound is hardcoded to 1”。For more details on how to use NDC space see https://github.com/bmild/nerf/files/4451808/ndc_derivation.pdf
# "datasets/llff.py", line:205# Step 3: correct scale so that the nearest depth is at a little more than 1.0# See https://github.com/bmild/nerf/issues/34 near_original = self.bounds.min() scale_factor = near_original*0.75 # 0.75 is the default parameter# the nearest depth is at 1/0.75=1.33 self.bounds /= scale_factor self.poses[..., 3] /= scale_factor
def get_ray_directions(H, W, focal):
"""
Get ray directions for all pixels in camera coordinate.
Reference: https://www.scratchapixel.com/lessons/3d-basic-rendering/
ray-tracing-generating-camera-rays/standard-coordinate-systems
Inputs:
H, W, focal: image height, width and focal length
Outputs:
directions: (H, W, 3), the direction of the rays in camera coordinate
"""
grid = create_meshgrid(H, W, normalized_coordinates=False)[0]
i, j = grid.unbind(-1)
# the direction here is without +0.5 pixel centering as calibration is not so accurate
# see https://github.com/bmild/nerf/issues/24
directions = \
torch.stack([(i-W/2)/focal, -(j-H/2)/focal, -torch.ones_like(i)], -1) # (H, W, 3)
return directions
Get ray origin and normalized directions in world coordinate for all pixels in one image. Reference: https://www.scratchapixel.com/lessons/3d-basic-rendering/ray-tracing-generating-camera-rays/standard-coordinate-systems
输入:
图像上每一点所对应的光线角度:(H, W, 3) precomputed ray directions in camera coordinate。 相机映射矩阵 c2w:(3, 4) transformation matrix from camera coordinate to world coordinate 输出:
光线原点在世界坐标系中的坐标:(HW, 3), the origin of the rays in world coordinate 在世界坐标系中,归一化的光线角度:(HW, 3), the normalized direction of the rays in world
def get_rays(directions, c2w):
"""
Get ray origin and normalized directions in world coordinate for all pixels in one image.
Reference: https://www.scratchapixel.com/lessons/3d-basic-rendering/
ray-tracing-generating-camera-rays/standard-coordinate-systems
Inputs:
directions: (H, W, 3) precomputed ray directions in camera coordinate
c2w: (3, 4) transformation matrix from camera coordinate to world coordinate
Outputs:
rays_o: (H*W, 3), the origin of the rays in world coordinate
rays_d: (H*W, 3), the normalized direction of the rays in world coordinate
"""
# Rotate ray directions from camera coordinate to the world coordinate
rays_d = directions @ c2w[:, :3].T # (H, W, 3)
rays_d = rays_d / torch.norm(rays_d, dim=-1, keepdim=True)
# The origin of all rays is the camera origin in world coordinate
rays_o = c2w[:, 3].expand(rays_d.shape) # (H, W, 3)
rays_d = rays_d.view(-1, 3)
rays_o = rays_o.view(-1, 3)
return rays_o, rays_d
NDC 下的光线
NDC (Normalized device coordinates) 归一化的设备坐标系。
首先对光线的边界进行限定:
near, far = 0, 1
然后对坐标进行平移和映射。
def get_ndc_rays(H, W, focal, near, rays_o, rays_d):
"""
Transform rays from world coordinate to NDC.
NDC: Space such that the canvas is a cube with sides [-1, 1] in each axis.
For detailed derivation, please see:
http://www.songho.ca/opengl/gl_projectionmatrix.html
https://github.com/bmild/nerf/files/4451808/ndc_derivation.pdf
In practice, use NDC "if and only if" the scene is unbounded (has a large depth).
See https://github.com/bmild/nerf/issues/18
Inputs:
H, W, focal: image height, width and focal length
near: (N_rays) or float, the depths of the near plane
rays_o: (N_rays, 3), the origin of the rays in world coordinate
rays_d: (N_rays, 3), the direction of the rays in world coordinate
Outputs:
rays_o: (N_rays, 3), the origin of the rays in NDC
rays_d: (N_rays, 3), the direction of the rays in NDC
"""
# Shift ray origins to near plane
t = -(near + rays_o[...,2]) / rays_d[...,2]
rays_o = rays_o + t[...,None] * rays_d
# Store some intermediate homogeneous results
ox_oz = rays_o[...,0] / rays_o[...,2]
oy_oz = rays_o[...,1] / rays_o[...,2]
# Projection
o0 = -1./(W/(2.*focal)) * ox_oz
o1 = -1./(H/(2.*focal)) * oy_oz
o2 = 1. + 2. * near / rays_o[...,2]
d0 = -1./(W/(2.*focal)) * (rays_d[...,0]/rays_d[...,2] - ox_oz)
d1 = -1./(H/(2.*focal)) * (rays_d[...,1]/rays_d[...,2] - oy_oz)
d2 = 1 - o2
rays_o = torch.stack([o0, o1, o2], -1) # (B, 3)
rays_d = torch.stack([d0, d1, d2], -1) # (B, 3)
return rays_o, rays_d
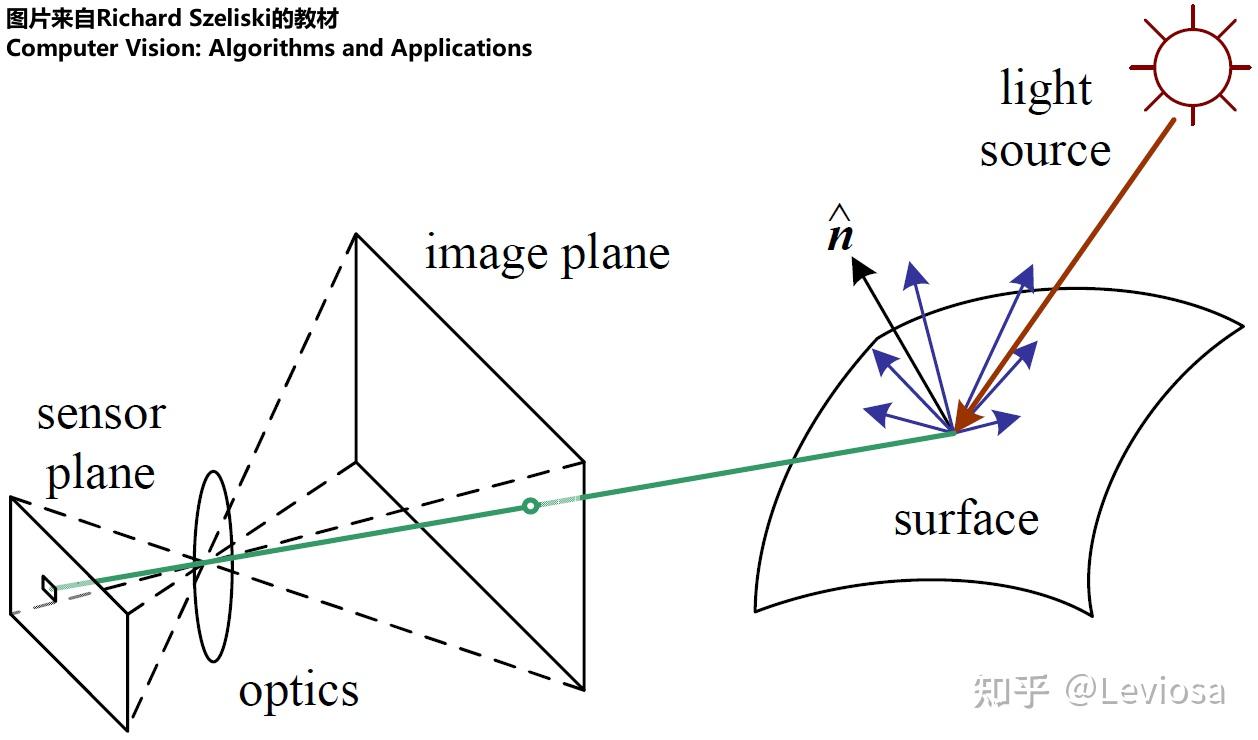
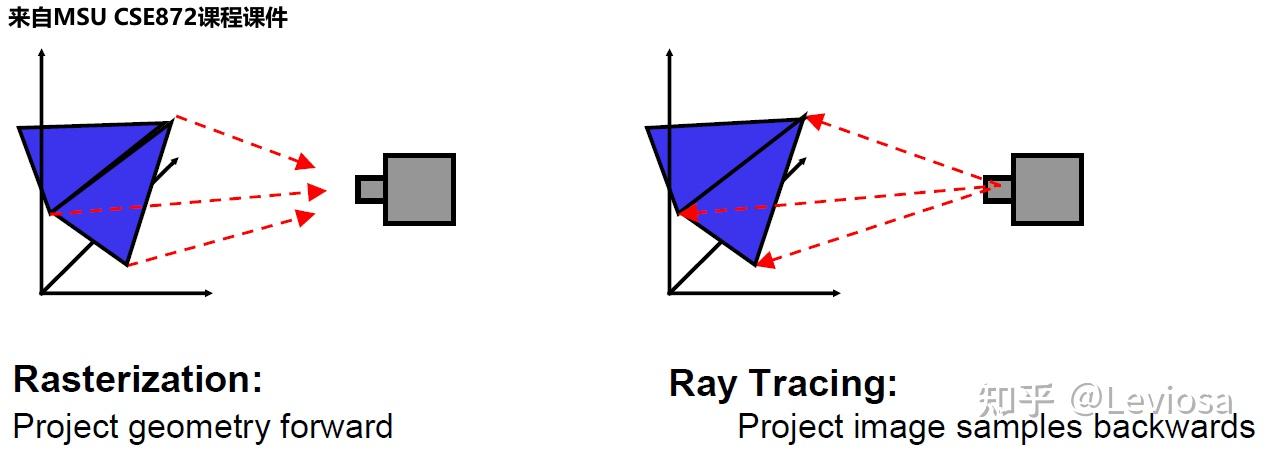
The process of transforming a scene definition including cameras, lights, surface geometry and material into a simulated camera image is known as rendering.
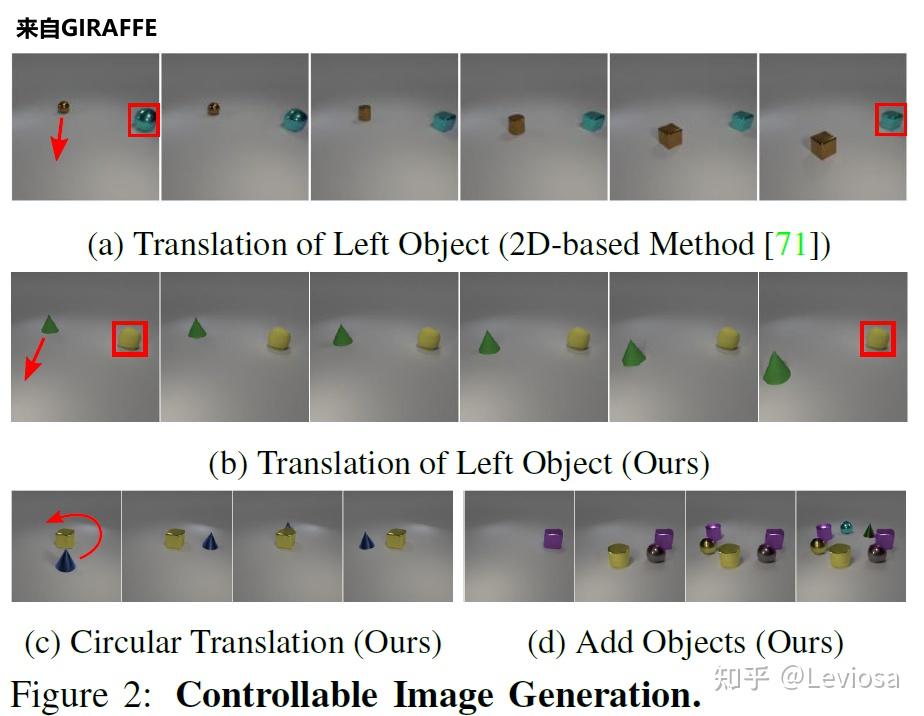
在GRAF之后,GIRAFFE实现了composition。在NeRF、GRAF中,一个Neural Radiance Fields表示一个场景,one model per scene。而在GIRAFFE中,一个Neural Radiance Fields只表示一个物体,one object per scene(背景也算一个物体)。这样做的妙处在于可以随意组合不同场景的物体,可以改变同一场景中不同物体间的相对位置,渲染生成更多训练数据中没有的全新图像。
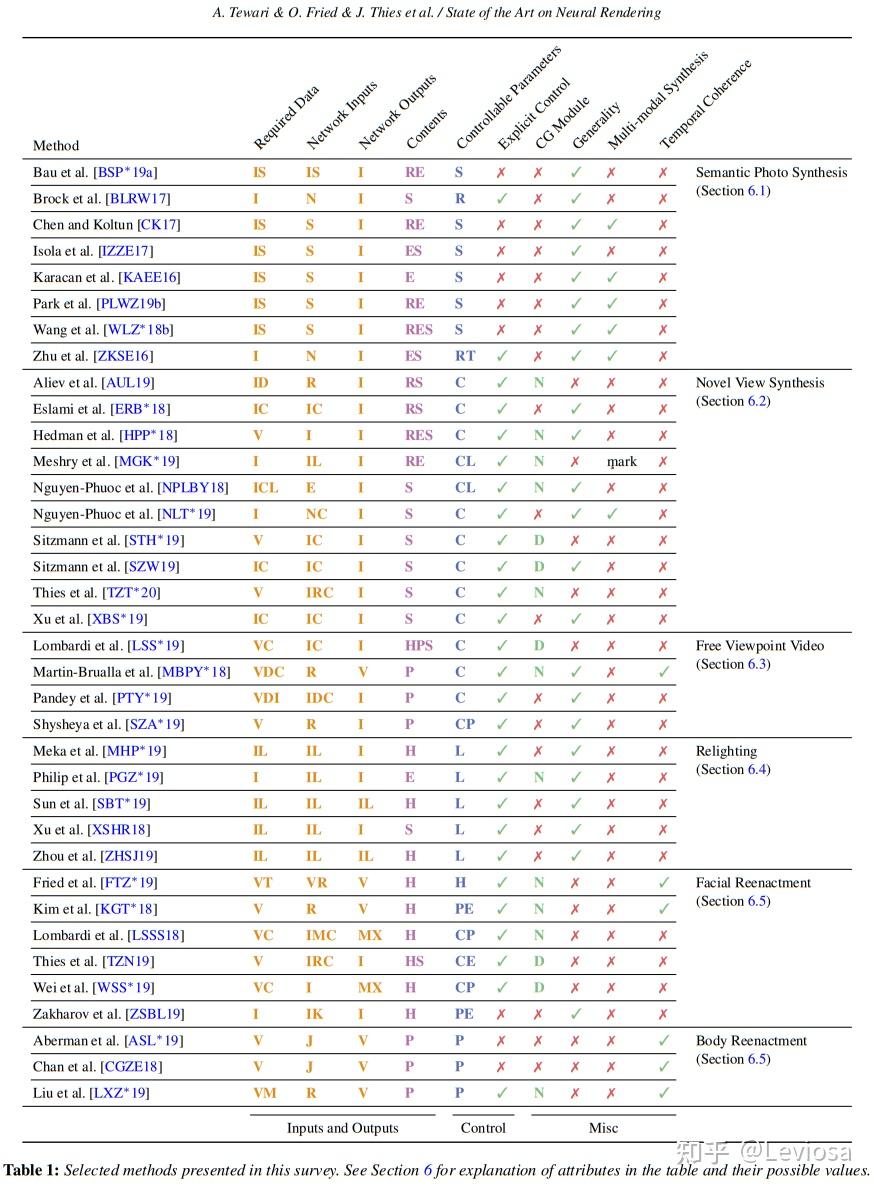
在针对这个更宽泛的概念的综述State of the Art on Neural Rendering中,Neural Rendering的主要研究方向被分为5类,NeRF在其中应属于第2类“Novel View Synthesis”(不过这篇综述早于NeRF发表,表中没有NeRF条目)。
Neural Rendering的5类主要研究方向
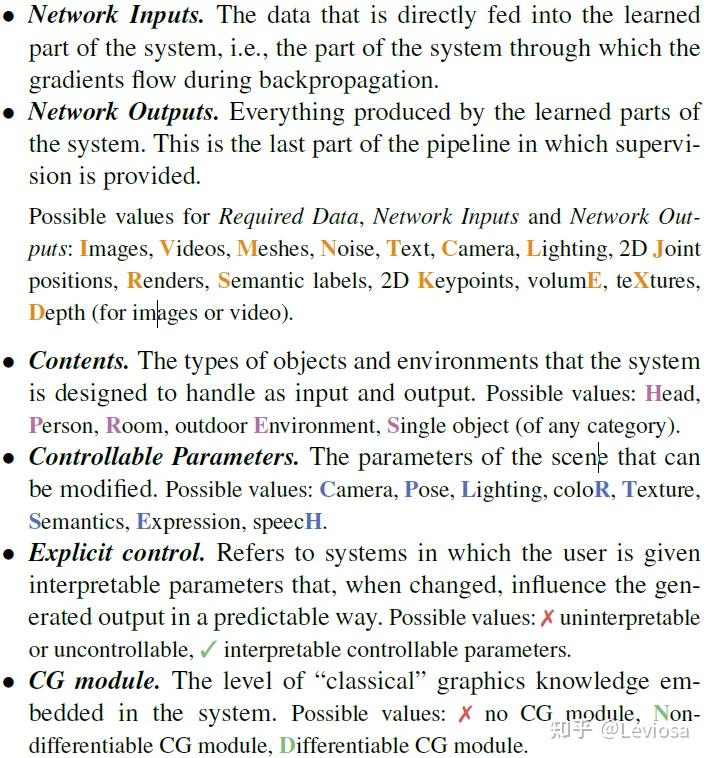
表中彩色字母缩写的含义:
在这篇综述中,Neural Rendering被定义为:
Deep image or video generation approaches that enable explicit or implicit control of scene properties such as illumination, camera parameters, pose, geometry, appearance, and semantic structure.
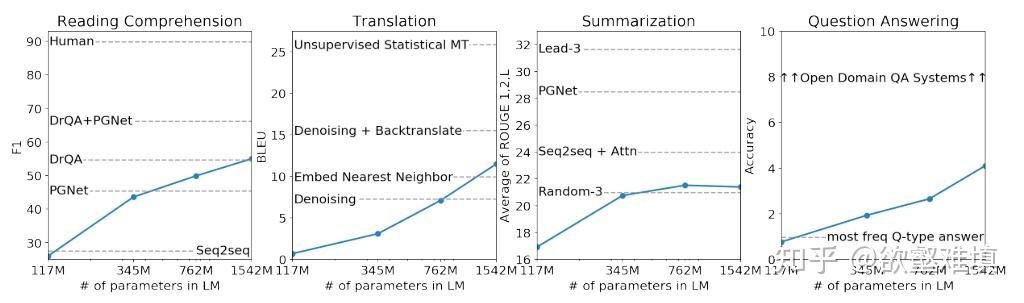
Language model performance scales as a power-law of model size, dataset size, and the amount of computation.
A language model trained on enough data can solve NLP tasks that it has never encountered. In other words, GPT-3 studies the model as a general solution for many downstream jobs without fine-tuning.
举个机器翻译的例子,要用 GPT-2 做 zero-shot 的机器翻译,只要将输入给模型的文本构造成 translate english to chinese, [englist text], [chinese text] 就好了。比如:translate english to chinese, [machine learning], [机器学习] 。这种做法就是日后鼎鼎大名的 prompt。
在训练数据的收集部分,作者提到他们没有使用 Common Crawl 的公开网页爬取数据,因为这些数据噪声太多,太多无意义的内容。他们是去 Reddit 爬取了大量有意义的文本。作者还指出,在 Reddit 的高质量文本中,很可能已经有类似 zero-shot 构造方式的样本供模型学习。一个机器翻译的例子如下所示。
In a now-deleted post from Aug. 16, Soheil Eid, Tory candidate in the riding of Joliette, wrote in French: ”Mentez mentez, il en restera toujours quelque chose,” which translates as, ”Lie lie and something will always remain.”
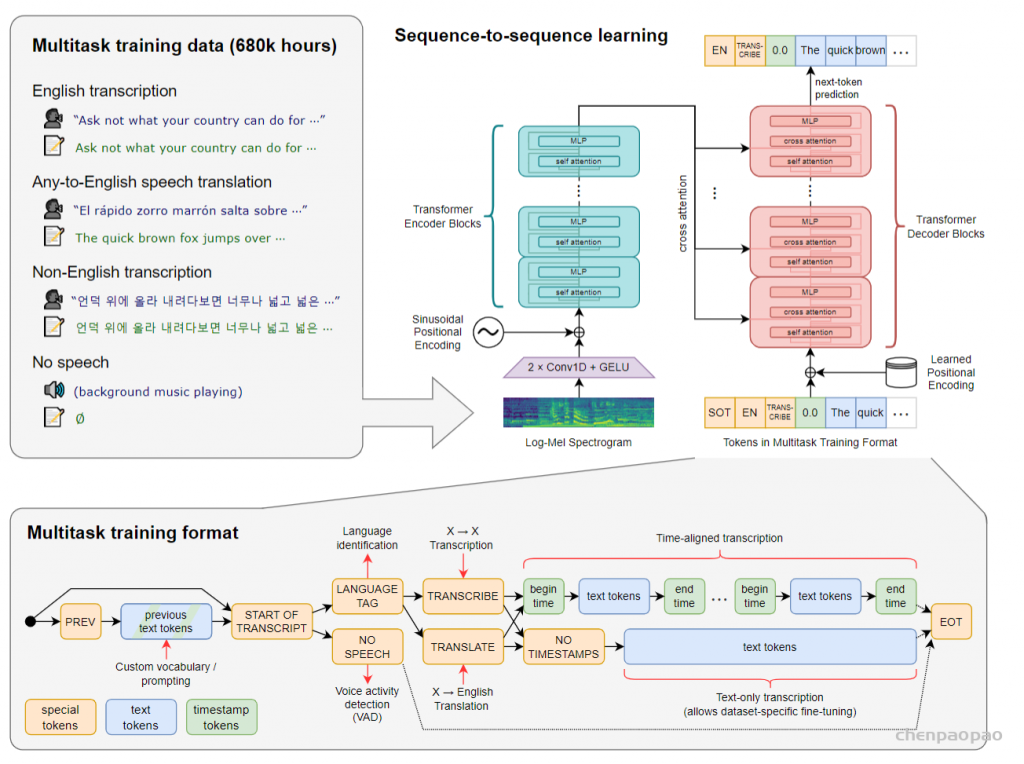
Overview of our approach. A sequence-to-sequence Transformer model is trained on many different speech processing tasks, including multilingual speech recognition, speech translation, spoken language identification, and voice activity detection
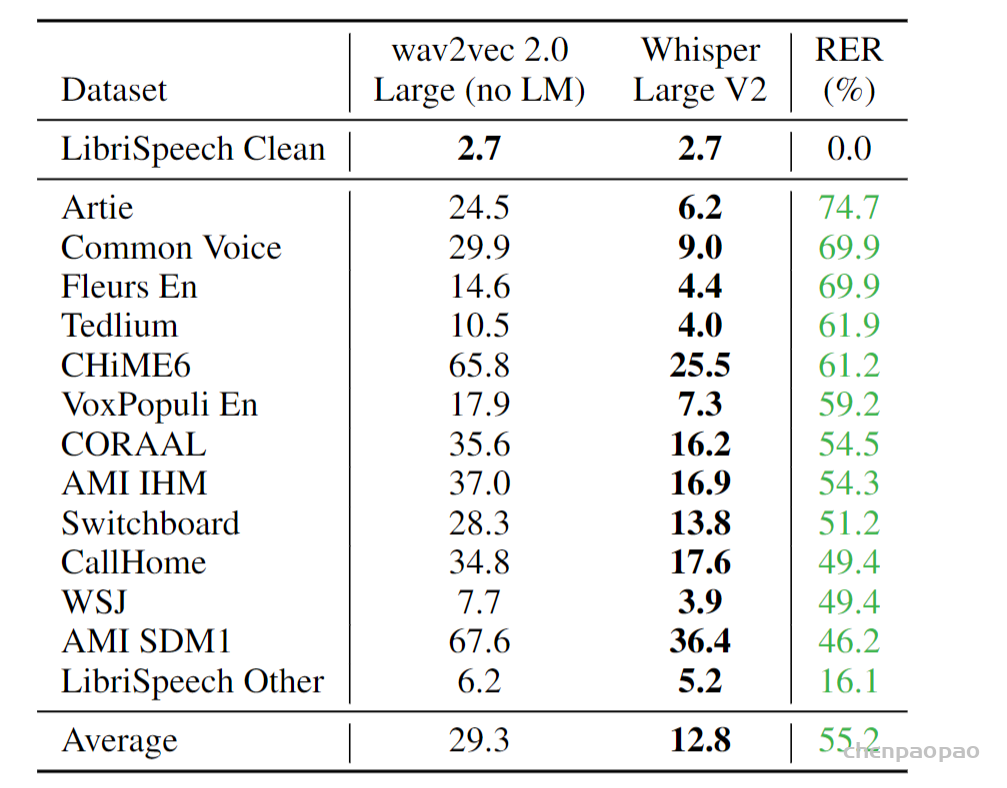
目前主流的语音识别方法是先进行大规模的无监督预训练(Wav2Vec 2.0),比如, Wav2Vec 采集了1000000h的无标签训练数据,先用这些数据进行预训练一个编码器(使用对比学习 or 字训练),encoder能够对语音数据做一个很好的编码,然后在面向下游任务时,可以在标准训练集中做微调(只需要几十小时的数据就可),这样比只在标准数据集上训练的结果好很多。
这些预训练好的语音编码器能够学习到语音的一个高质量表示,但是用无监督方法训练的编码器仍然需要训练一个解码器,需要用带标签的数据来微调,微调是一个很复杂的过程,如果不需要微调就好了,这也是本文要做的工作。此外,过去的工作缺乏一个很好的解码器,这是一个巨大的缺陷,而语音识别系统就是应该是“out of box”,也就是拿来即用。
数据部分是本文最核心的贡献。由于数据够多,模型够强,本文模型直接预测原始文本,而不经过任何标准化(standardization)。从而模型的输出就是最终识别结果,而无需经过反向的文本归一化(inverse text normalization)后处理。所谓文本归一化包括如将所有单词变小写,所有简写展开,所有标点去掉等操作,而反向文本归一化就是上述操作的反过程。在 Whisper 中,这些操作统统不用,因为数据足够多,可以覆盖所有的情况。