
pixelNeRF: Neural Radiance Fields from One or Few Images
代码链接:https://github.com/sxyu/pixel-nerf
论文链接:https://alexyu.net/pixelnerf/
Nerf提出以来,收到了大量关注。但是,它仍存在以下缺点:
- Nerf的训练需要很多标准化的照片
- 训练花费大量时间
因此,本文提出了一种基于全卷积的Nerf:pixelNerf。当经过大量训练后,pixelNerf可以仅通过几张(甚至一张)照片进行良好的视图合成,同时这种方式也不需要精确的3D监督(2D监督即可)。
作者提出了pixelNeRF,一个只需要输入单张或多张图像,就能得到连续场景表示的学习框架。由于现存的构建神经辐射场的方法涉及到独立优化每个场景的表示,这需要许多校准的视图和大量的计算时间,因此作者引入了一种新的网络架构。实验结果表明,在所有情况下,pixelNeRF在新视图合成和单图像三维重建方面都优于当前最先进的工作。
该项目主要研究的问题是如何从一个稀疏的输入视图集中合成这个场景的新视图,在可微神经渲染出现之前,这个长期存在的问题一直没有得到进展。同时,最近的神经渲染场NeRF通过编码体积密度和颜色,在特定场景的新视图合成方面表现出很好的效果。虽然NeRF可以渲染非常逼真的新视图,但它通常是不切实际的,因为它需要大量的位姿图像和冗长的场景优化。
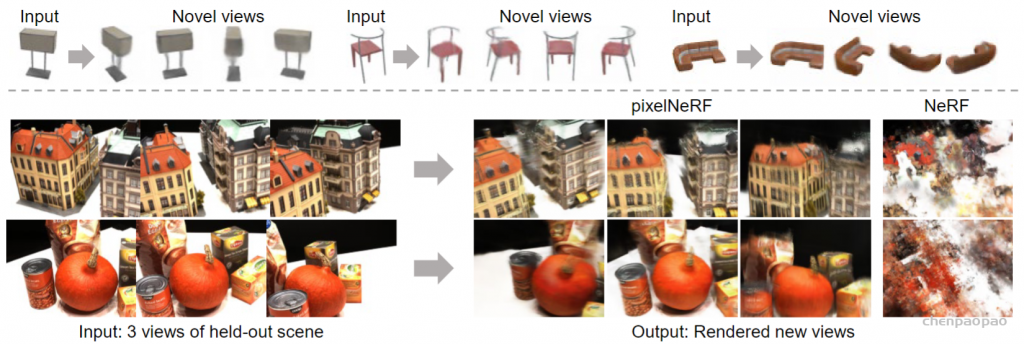
在这篇文章中,作者对上述方法进行了改进,与NeRF网络不使用任何图像特征不同的是,pixelNeRF将与每个像素对齐的空间图像特征作为输入。这种图像调节允许框架在一组多视图图像上进行训练,学习场景先验,然后从一个或几个输入图像中合成视图,如下图所示。
PixelNeRF具有很多特点:首先,Pixel可以在多视图图像的数据集上面进行训练,而不需要任何额外的监督;其次,PixelNeRF预测输入图像的摄像机坐标系中的NeRF表示,而不是标准坐标系,这是泛化看不见的场景和物体类别的必要条件,因为在有多个物体的场景中,不存在明确的规范坐标系;第三,它是完全卷积的,这允许它保持图像和输出3D表示之间的空间对齐;最后,PixelNeRF可以在测试时合并任意数量的输入视图,且不需要任何优化。
相关工作
新视图合成:这是一个长期存在的问题,它需要从一组输入视图中构建一个场景的新视图。尽管现在有很多工作都已经取得了逼真的效果,但是存在比较多的问题,例如需要密集的视图和大量的优化时间。其他方法通过学习跨场景共享的先验知识,从单个或少数输入视图进行新的视图合成,但是这些方法使用2.5D表示,因此它们能够合成的摄像机运动范围是有限的。在这项工作中,作者提出了PixelNeRF,能够直接从相当大的基线中合成新视图。
基于学习的三维重建:得益于深度学习的发展,单视图或多视图的三维重建也得到快速的发展。问题是,很多表示方法都需要3D模型进行监督,尽管多视图监督限制更小、更容易获取,其中的很多方法也需要物体的mask。相比之下,PixelNeRF可以单独从图像中训练,允许它应用到含有两个对象的场景而不需要修改。
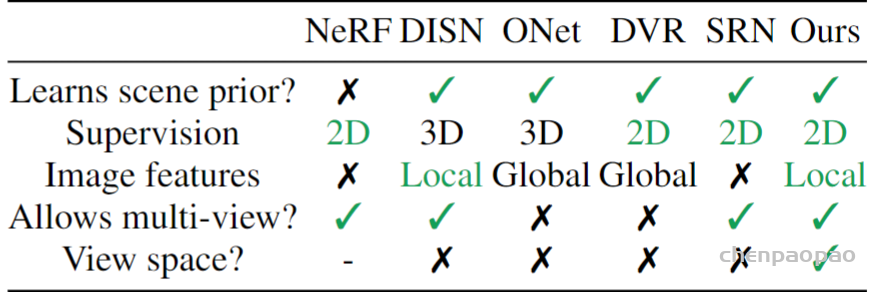
以观察者为中心的三维重建:对于3D学习任务,可以在以观察者为中心的坐标系(即视图空间)或以对象为中心的坐标系(即规范空间)中进行预测。大多数现存的方法都是在规范空间中进行预测,虽然这使得学习空间规律更加容易,但是会降低不可见对象和具有多个对象场景的预测性能。PixelNeRF在视图空间中操作,这在【2】中已经被证明可以更好地重建看不见的对象类别,并且不鼓励对训练集的记忆。下表是PixelNeRF和其他方法的对比:
NeRF的缺点:
虽然NeRF实现了最新的视图合成,但它是一种基于优化的方法,每个场景必须单独优化,场景之间没有知识共享。这种方法不仅耗时,而且在单个或极稀疏视图的限制下,无法利用任何先验知识来加速重建或完成形状。
基于图像的NeRF:pixelNeRF
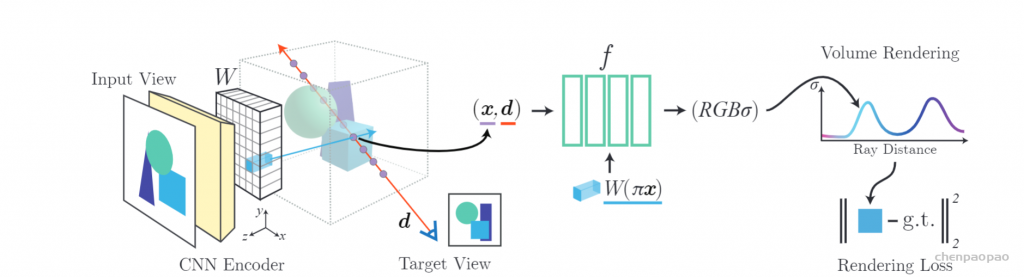
为了克服上面提到的关于NeRF的问题,作者提出了一种基于空间图像特征的NeRF结构。该模型由两个部分组成:一个完全卷积的图像编码器E (将输入图像编码为像素对齐的特征网格)和一个NeRF网络f (给定一个空间位置及其对应的编码特征,输出颜色和密度)。
单视图pixelNeRF:首先固定坐标系为输入图像的视图空间,并在这个坐标系中指定位置和摄像机光线。给定场景的输入图像I,首先提取出它的特征量W=E(I)。然后,对于相机光线上的一个点x,通过使用已知的内参,将x投影到图像坐标π(x)上,然后在像素特征之间进行双线性插值来提取相应的图像特征向量W(π(x))。最后把图像特征连同位置和视图方向(都在输入视图坐标系统中)传递到NeRF网络:其中γ()是x上的位置编码。

合并多个视图:多个视图提供了有关场景的附加信息,并解决了单视图固有的三维几何歧义。作者扩展了该模型,不同于现有的在测试时只使用单个输入视图的方法,它允许在测试时有任意数量的视图。
在有多个输入视图的情况下,只假设相对的相机姿态是已知的,为了便于解释,可以为场景任意固定一个世界坐标系。把输入图像记为I,其相关联的摄像机记为P=[R t]。对于新的目标摄影机光线,将视图方向为d的点x转换到每个输入视图i的坐标系,转换如下:

为了获得输出的密度和颜色,作者独立地处理每个视图坐标帧中的坐标和相应的特征,并在NeRF网络中聚合视图。将NeRF网络的初始层表示为f1,它分别处理每个输入视图空间中的输入,并将最终层表示为f2,它处理聚合视图。
和单视图类似,作者将每个输入图像编码成特征体积W(i)=E(I(i))。对于点x(i),在投影图像坐标π(x(i))处从特征体W(i)中提取相应的图像特征,然后将这些输入传递到f1,以获得中间向量:

最后用平均池化算子ψ将中间向量V(i)聚合并传递到最后一层f2,得到预测的密度和颜色:

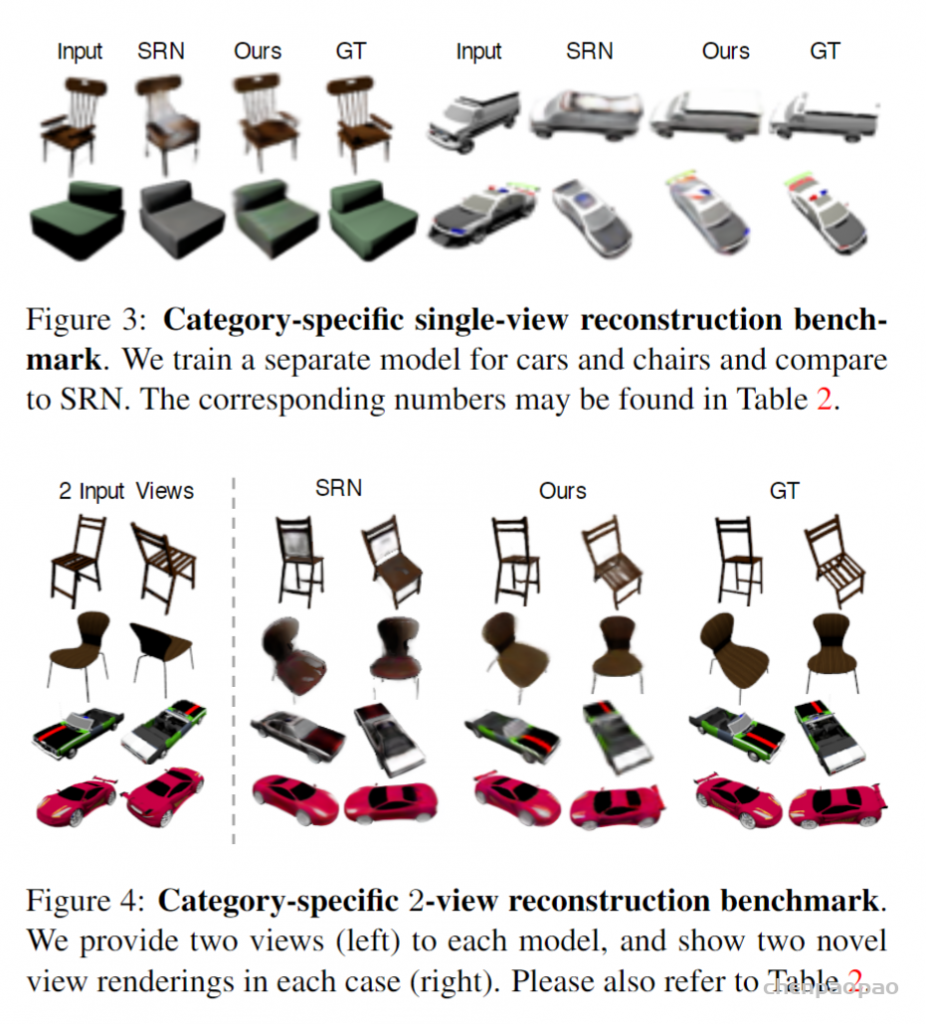
个人觉得,这篇文章其实就是对原始Nerf做了一个效果很好的改进:将图片进行特征提取后再输入Nerf,(似乎并没有很多的创新),但是从图中展现的效果来看,这一改进是卓有成效的,或许也为我们提供了一种新的思路。
目前的缺陷:
1) Like NeRF, our rendering time is slow, and in fact, our runtime increases linearly when given more input views. Further, some methods (e.g. [28, 21]) can recover a mesh from the image enabling fast rendering and manipulation afterwards, while NeRF based representations cannot be converted to meshes very reliably. Improving NeRF’s efficiency is an important re-search question that can enable real-time applications.
2) As in the vanilla NeRF, we manually tune ray sampling bounds tn,tf and a scale for the positional encoding. Making NeRF-related methods scale-invariant is a crucial challenge.
3) While we have demonstrated our method on real data from the DTU dataset, we acknowledge that this dataset was captured under controlled settings and has matching camera poses across all scenes with limited viewpoints. Ultimately,our approach is bottlenecked by the availability of largescale wide baseline multi-view datasets, limiting the applicability to datasets such as ShapeNet and DTU. Learning
a general prior for 360◦ scenes in-the-wild is an exciting direction for future work
参考文献:
【1】Ben Mildenhall, Pratul P. Srinivasan, Matthew Tancik,Jonathan T. Barron, Ravi Ramamoorthi, and Ren Ng. Nerf: Representing scenes as neural radiance fields for view synthesis. In Eur. Conf. Comput. Vis., 2020
【2】Daeyun Shin, Charless Fowlkes, and Derek Hoiem. Pixels, voxels, and views: A study of shape representations for single view 3d object shape prediction. In IEEE Conf. Comput.Vis. Pattern Recog., 2018.