
Marching Cubes算法是三维离散数据场中提取等值面的经典算法,其主要应用于医学领域的可视化场景,例如CT扫描和MRI扫描的3D重建等。
Marching Cube 首先将空间分成众多的六面体网格,类似将空间分成很多的小块
我们有很多的已知采样点,并且知道这些点在空间中的空间场值,现在我们将空间分为很多个小格子,每个小格子都有8个顶点,我们通过计算8个顶点周围(范围与六面体的大小相关)的采样点,近似计算出8个顶点的空间场值(加权评价等方法)。
以0等值面为例:如何找到0等值面经过的六面体网格?
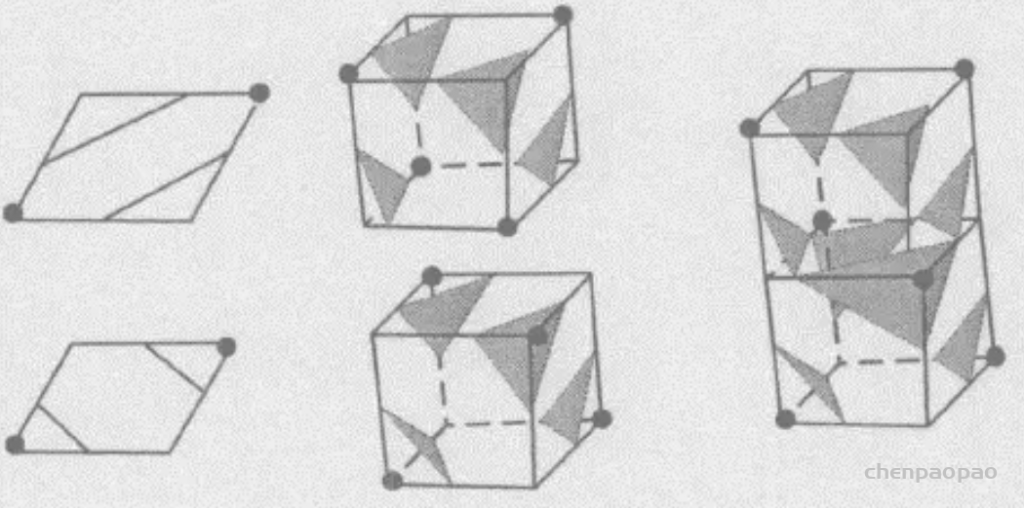
算法主要的思想是在三维离散数据场中通过线性插值来逼近等值面,具体如下:三维离散数据场中每个栅格单元作为一个体素,体素的每个顶点都存在对应的标量值。如果体素顶点上的值大于或等于等值面值,则定义该顶点位于等值面之外,标记为“0”;而如果体素顶点上的值小于等值面值,则定义该顶点位于等值面之内,标记为“1”。由于每个体素单元有8个顶点,那么共存在2^8 = 256种情形,下图是Marching Cubes算法的15种基本情形,其他241种情形可以通过这15种基本情形的旋转、映射等方式实现。

每个体素单元上顶点和边的索引规则如下图左所示,假如体素下方的顶点3的值小于等值面值,其他顶点上的值都大于等值面值(如下图右所示),那么我们可以生成一个与体素边2,3,11相交的三角面片,而三角面片顶点的具体位置则需要根据等值面值和边顶点3-2,3-0,3-7的值线性插值计算得到。

对于与等值面存在交点的体素边,交点坐标用P表示,P1、P2代表边上两个端点的坐标,V1、V2代表这两个端点上的值,V代表等值面值,那么交点坐标的计算公式如下:
P = P1 + (V – V1)·(P2 – P1)/(V2 – V1)
算法第一步:通过edgeTable表判断等值面和体素单元哪一条边相交
体素单元顶点状态的索引号定义规则如下:

cubeindex = 0; if (V[0] < isolevel) cubeindex |= 1; if (V[1] < isolevel) cubeindex |= 2; if (V[2] < isolevel) cubeindex |= 4; if (V[3] < isolevel) cubeindex |= 8; if (V[4] < isolevel) cubeindex |= 16; if (V[5] < isolevel) cubeindex |= 32; if (V[6] < isolevel) cubeindex |= 64; if (V[7] < isolevel) cubeindex |= 128;
以上图所示为例,仅顶点3标记为“1”,其他顶点标记为“0”,那么体素单元的顶点状态为0000 1000或者8,通过查找表得到edgeTable[8] = 1000 0000 1100,意味着体素单元的边2,3,11和等值面相交,然后通过线性插值计算各个交点的位置。
算法第二步:通过triTable表生成对应三角面片的组成情况
还是以上图所示为例,通过查找表得到triTable[8] = {3, 11, 2, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1},意味着该种顶点状态可以生成三角面片(3, 11, 2),代表三角面片的3个顶点为边3,11,2和等值面相交的交点。
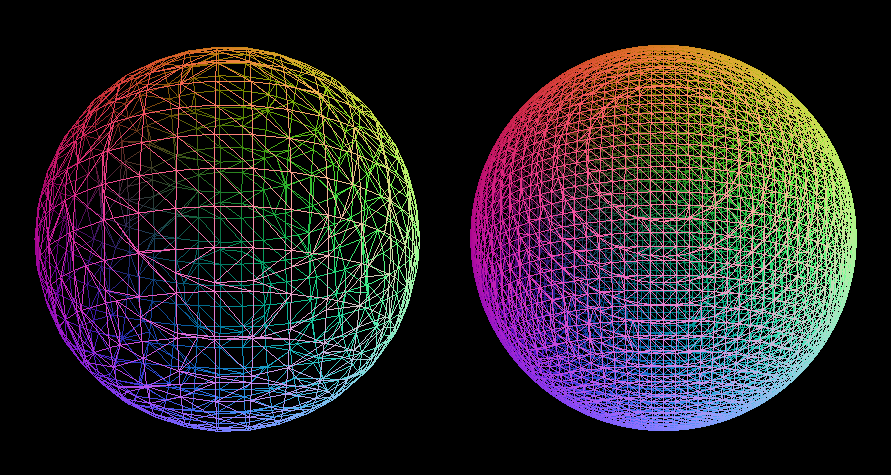
经过上述步骤之后,我们可以得到等值面的点面信息。为了进一步完善显示效果,需要调整顶点法向。假设顶点(i, j, k)上的值为f(i, j, k),采用中心差分方法可以计算该点处的梯度矢量:
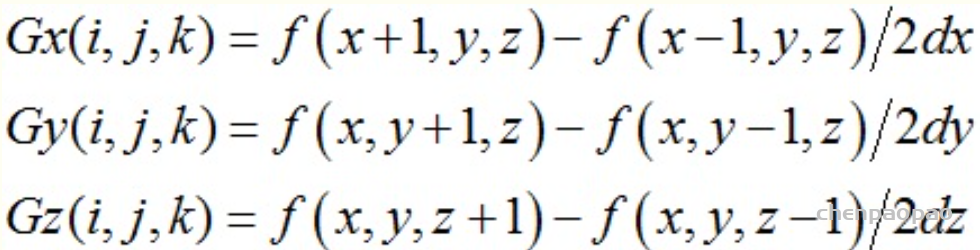
对G进行归一化,得到顶点(i, j, k)上的单位法向量,然后对体素单元上8个顶点的法向量进行线性插值就可得到三角面片各个顶点的显示法向量。
参考:http://graphics.stanford.edu/~mdfisher/MarchingCubes.html
Marching Cube的问题
当然最初的Marching Cube 有很多问题,例如拓扑连接二义性,一种状态可以有多种连接关系
而且Marching Cube的效率不是特别高,需要借助分层结构和并行计算。
而且Marching Cube生成面片的大小与六面体的大小相关,过大则会导致模型模糊,细节消失,过小会导致面片的数目过多。
但是从1987年提出Marching Cube至今,已经对其有了很多的改进和优化算法,在处理时间,减少内存开销,分辨率方面都有很大的优化。