
论文:https://arxiv.org/abs/1612.00593(cvpr2017)
code:https://github.com/charlesq34/pointnet

基础知识:
1、什么是点云?
简单来说就是一堆三维点的集合,必须包括各个点的三维坐标信息,其他信息比如各个点的法向量、颜色等均是可选。点云的文件格式可以有很多种,包括xyz,npy,ply,obj,off等(有些是mesh不过问题不大,因为mesh可以通过泊松采样等方式转化成点云)。对于单个点云,如果你使用np.loadtxt得到的实际上就是一个维度为 (num_points,num_channels) 的张量,num_channels一般为3,表示点云的三维坐标。
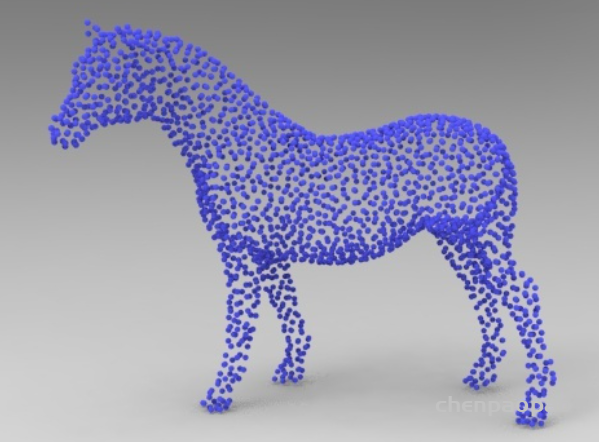
这里以horse.xyz文件为例,实际就是文本文件,打开后数据长这样(局部,总共有2048个点):
实际就是一堆点的信息,这里只有三维坐标,将其可视化出来长这样:
2、点云处理任务是重要的?
三维图形具有多种表现形式,包括了mesh、体素、点云等,甚至还有些方法使用多视图来对三维图形表征。而点云在以上各种形式的数据中算是日常生活中最能够大规模获取和使用的数据结构了,包括自动驾驶、增强现实等在内的应用需要直接或间接从点云中提取信息,点云处理也逐渐成为计算机视觉非常重要的一部分。
正文:
PointNet所作的事情就是对点云做特征学习,并将学习到的特征去做不同的应用:分类(shape-wise feature)、分割(point-wise feature)等。
PointNet之所以影响力巨大,就是因为它为点云处理提供了一个简单、高效、强大的特征提取器(encoder),几乎可以应用到点云处理的各个应用中,其地位类似于图像领域的AlexNet。
1、动机
点云或者mesh,大多数研究人员都是将其转化成3D体素或者多视图来做特征学习的,这其中的工作包括了VoxelNet, MVCNN等。这些工作都或多或少存在了一些问题。
直接对点云做特征学习也不是不可以,但有几个问题需要考虑:特征学习需要对点云中各个点的排列保持不变性、特征学习需要对rigid transformation保持不变性等。虽然有挑战,但是深度学习强大的表征能力以及其在图像领域取得的巨大成功,因此是很有必要直接在点云上进行尝试的。
2、贡献
- 我们设计了一个新颖的深层网络架构来处理三维中的无序点集
- 我们设计的网络表征可以做三维图形分类、图形的局部分割以及场景的语义分割等任务
- 我们提供了完备的经验和理论分析来证明PointNet的稳定和高效。
- 充分的消融实验,证明网络各个部分对于表征的有效性。
3、方法
3.1 点云的几个特点:
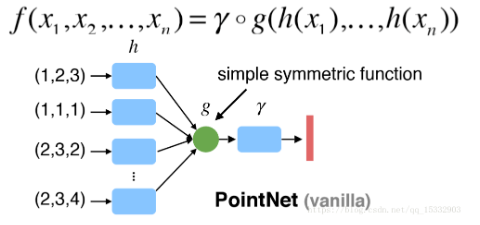
- 无序性 –> 对称函数设计用于表征
- 点不是孤立的,需要考虑局部结构 –> 局部全局特征结合
- 仿射变换无关性 –> alignment network
(重要)关于第三点:相同的点云在空间中经过一定的刚性变化(旋转或平移),坐标发生变化。其实对于点云分类or分割任务来说(分割可以认为是点的分类),例如,整体的旋转和平移不应修改全局点云类别和每个点的类别,也不应修改点的分割因此需要保证仿射变换无关性(简单来说,“仿射变换”就是:“线性变换”+“平移”),但是对于位置 敏感的 任务:点云配准、点云补全任务,对于位置敏感,就不需要保证 仿射变换的无关性 。
我们希望不论点云在怎样的坐标系下呈现,网络都能正确的识别出。这个问题可以通过STN(spacial transform netw)来解决。三维不太一样的是点云是一个不规则的结构(无序,无网格),不需要重采样的过程。pointnet通过学习一个矩阵来达到对目标最有效的变换。
解决方法
- 空间变换网络解决旋转问题:三维的STN可以通过学习点云本身的位姿信息学习到一个最有利于网络进行分类或分割的DxD旋转矩阵(D代表特征维度,pointnet中D采用3和64)。至于其中的原理,我的理解是,通过控制最后的loss来对变换矩阵进行调整,pointnet并不关心最后真正做了什么变换,只要有利于最后的结果都可以。pointnet采用了两次STN,第一次input transform是对空间中点云进行调整,直观上理解是旋转出一个更有利于分类或分割的角度,比如把物体转到正面;第二次feature transform是对提取出的64维特征进行对齐,即在特征层面对点云进行变换。
- maxpooling解决无序性问题:网络对每个点进行了一定程度的特征提取之后,maxpooling可以对点云的整体提取出global feature。
3.2 网络结构:
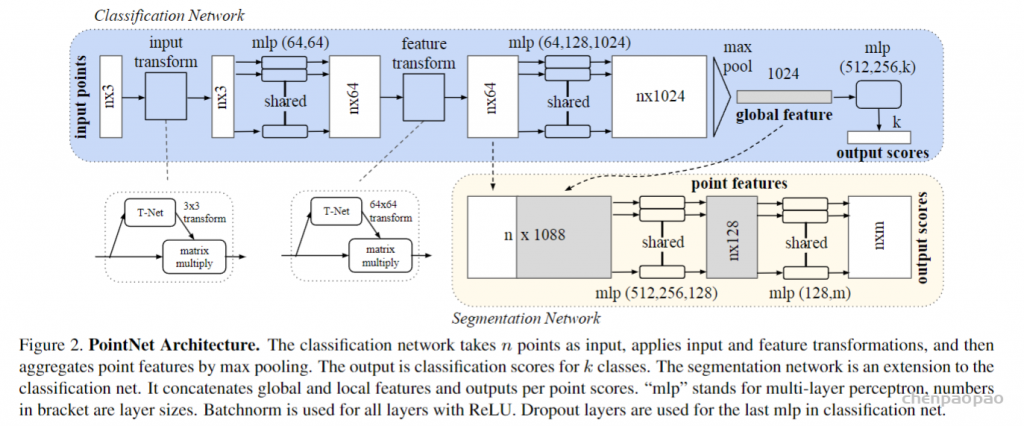
网络分成了分类网络和分割网络2个部分,大体思路类似,都是设计表征的过程分类网络设计global feature,分割网络设计point-wise feature。两者都是为了让表征尽可能discriminative,也就是同类的能分到一类,不同类的距离能拉开。
输入 n*3 n是点数
inputtransform:放射变换(为了保证仿射变换的不变性):直接预测一个变换矩阵(3*3)来处理输入点的坐标(对所有坐标进行变换)。因为会有数据增强的操作存在,这样做可以在一定程度上保证网络可以学习到变换无关性。T-Net模型,它的主要作用是学习出变化矩阵来对输入的点云或特征进行规范化处理。
MLP:
有两种实现方法:
1、输入 B,N,3 —- nn.liner层 — B,N,64
2、输入 B,3,N —- conv1d(1×1) — B,64,N
Pooling:
为了解决无序性(点云本质上是一长串点(nx3矩阵,其中n是点数)。在几何上,点的顺序不影响它在空间中对整体形状的表示,例如,相同的点云可以由两个完全不同的矩阵表示。)使用 maxpooling或sumpooling,也就是说,最后的D维特征对每一维都选取N个点中对应的最大特征值或特征值总和,这样就可以通过g来解决无序性问题。
最后再经过一个mlp(代码中运用全连接)得到k个score。分类网络最后接的loss是softmax。
分割网络:
将池化后的特征和前一阶段特征拼接,池化后的特征有全局信息,在和之前的拼接,以此得到同时对局部信息和全局信息感知的point-wise特征,提升表征效果。然后最后输出n*m, m为类别数量,表示每个点的类别信息。
损失函数:
分类中常用的交叉熵+alignment network中用于约束生成的alignment matrix的loss
dataset and experiments
evaluate metric
分类:分类准确率acc
分割:mIoU
dataset
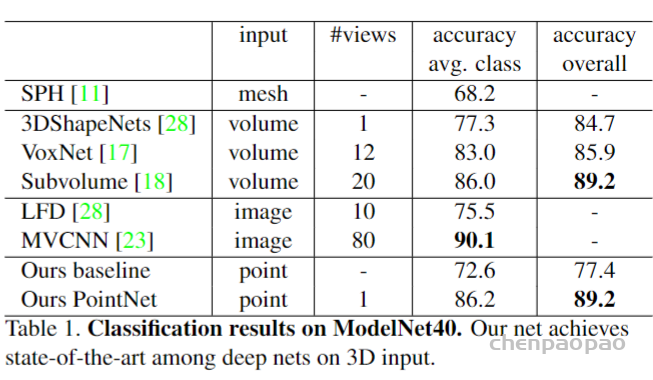
分类:ModelNet40
分割:ShapeNet Part dataset和Stanford 3D semantic parsing dataset
experiments
1、分类:
2、局部分割:

code:
1. 如何对点云使用MLP?
2. alignment network怎么做的?
3. 对称函数如何实现来提取global feature的?
4. loss?
def get_model(point_cloud, is_training, bn_decay=None):
""" Classification PointNet, input is BxNx3, output Bx40 """
batch_size = point_cloud.get_shape()[0].value
num_point = point_cloud.get_shape()[1].value
end_points = {}
with tf.variable_scope('transform_net1') as sc:
transform = input_transform_net(point_cloud, is_training, bn_decay, K=3)
point_cloud_transformed = tf.matmul(point_cloud, transform)
input_image = tf.expand_dims(point_cloud_transformed, -1)
net = tf_util.conv2d(input_image, 64, [1,3],
padding='VALID', stride=[1,1],
bn=True, is_training=is_training,
scope='conv1', bn_decay=bn_decay)
net = tf_util.conv2d(net, 64, [1,1],
padding='VALID', stride=[1,1],
bn=True, is_training=is_training,
scope='conv2', bn_decay=bn_decay)
with tf.variable_scope('transform_net2') as sc:
transform = feature_transform_net(net, is_training, bn_decay, K=64)
end_points['transform'] = transform
net_transformed = tf.matmul(tf.squeeze(net, axis=[2]), transform)
net_transformed = tf.expand_dims(net_transformed, [2])
net = tf_util.conv2d(net_transformed, 64, [1,1],
padding='VALID', stride=[1,1],
bn=True, is_training=is_training,
scope='conv3', bn_decay=bn_decay)
net = tf_util.conv2d(net, 128, [1,1],
padding='VALID', stride=[1,1],
bn=True, is_training=is_training,
scope='conv4', bn_decay=bn_decay)
net = tf_util.conv2d(net, 1024, [1,1],
padding='VALID', stride=[1,1],
bn=True, is_training=is_training,
scope='conv5', bn_decay=bn_decay)
# Symmetric function: max pooling
net = tf_util.max_pool2d(net, [num_point,1],
padding='VALID', scope='maxpool')
net = tf.reshape(net, [batch_size, -1])
net = tf_util.fully_connected(net, 512, bn=True, is_training=is_training,
scope='fc1', bn_decay=bn_decay)
net = tf_util.dropout(net, keep_prob=0.7, is_training=is_training,
scope='dp1')
net = tf_util.fully_connected(net, 256, bn=True, is_training=is_training,
scope='fc2', bn_decay=bn_decay)
net = tf_util.dropout(net, keep_prob=0.7, is_training=is_training,
scope='dp2')
net = tf_util.fully_connected(net, 40, activation_fn=None, scope='fc3')
return net, end_pointsMLP的核心做法:
input_image = tf.expand_dims(point_cloud_transformed, -1)
net = tf_util.conv2d(input_image, 64, [1,3],
padding='VALID', stride=[1,1],
bn=True, is_training=is_training,
scope='conv1', bn_decay=bn_decay)
net = tf_util.conv2d(net, 64, [1,1],
padding='VALID', stride=[1,1],
bn=True, is_training=is_training,
scope='conv2', bn_decay=bn_decay)
这里input_image维度是 B×N×3×1 ,因此将点云看成是W和H分为N和3的2D图像,维度是 1
然后直接基于这个“2D图像”做卷积,第一个卷积核size是 [1,3] ,正好对应的就是“2D图像”的一行,也就是一个点(三维坐标),输出通道数是64,因此输出张量维度应该是 B×N×1×64
第二个卷积核size是 [1,1] , 1∗1 卷积只改变通道数,输出张量维度是 B×N×1×64
conv2d就是将卷积封装了一下,核心部分也就是调用tf.nn.conv2d,实现如下:
def conv2d(inputs,
num_output_channels,
kernel_size,
scope,
stride=[1, 1],
padding='SAME',
use_xavier=True,
stddev=1e-3,
weight_decay=0.0,
activation_fn=tf.nn.relu,
bn=False,
bn_decay=None,
is_training=None):
""" 2D convolution with non-linear operation.
Args:
inputs: 4-D tensor variable BxHxWxC
num_output_channels: int
kernel_size: a list of 2 ints
scope: string
stride: a list of 2 ints
padding: 'SAME' or 'VALID'
use_xavier: bool, use xavier_initializer if true
stddev: float, stddev for truncated_normal init
weight_decay: float
activation_fn: function
bn: bool, whether to use batch norm
bn_decay: float or float tensor variable in [0,1]
is_training: bool Tensor variable
Returns:
Variable tensor
"""
with tf.variable_scope(scope) as sc:
kernel_h, kernel_w = kernel_size
num_in_channels = inputs.get_shape()[-1].value
kernel_shape = [kernel_h, kernel_w,
num_in_channels, num_output_channels]
kernel = _variable_with_weight_decay('weights',
shape=kernel_shape,
use_xavier=use_xavier,
stddev=stddev,
wd=weight_decay)
stride_h, stride_w = stride
outputs = tf.nn.conv2d(inputs, kernel,
[1, stride_h, stride_w, 1],
padding=padding)
biases = _variable_on_cpu('biases', [num_output_channels],
tf.constant_initializer(0.0))
outputs = tf.nn.bias_add(outputs, biases)
if bn:
outputs = batch_norm_for_conv2d(outputs, is_training,
bn_decay=bn_decay, scope='bn')
if activation_fn is not None:
outputs = activation_fn(outputs)
return outputsalignment network :
input_transform_net为例:
def input_transform_net(point_cloud, is_training, bn_decay=None, K=3):
""" Input (XYZ) Transform Net, input is BxNx3 gray image
Return:
Transformation matrix of size 3xK """
batch_size = point_cloud.get_shape()[0].value
num_point = point_cloud.get_shape()[1].value
input_image = tf.expand_dims(point_cloud, -1)
net = tf_util.conv2d(input_image, 64, [1,3],
padding='VALID', stride=[1,1],
bn=True, is_training=is_training,
scope='tconv1', bn_decay=bn_decay)
net = tf_util.conv2d(net, 128, [1,1],
padding='VALID', stride=[1,1],
bn=True, is_training=is_training,
scope='tconv2', bn_decay=bn_decay)
net = tf_util.conv2d(net, 1024, [1,1],
padding='VALID', stride=[1,1],
bn=True, is_training=is_training,
scope='tconv3', bn_decay=bn_decay)
net = tf_util.max_pool2d(net, [num_point,1],
padding='VALID', scope='tmaxpool')
net = tf.reshape(net, [batch_size, -1])
net = tf_util.fully_connected(net, 512, bn=True, is_training=is_training,
scope='tfc1', bn_decay=bn_decay)
net = tf_util.fully_connected(net, 256, bn=True, is_training=is_training,
scope='tfc2', bn_decay=bn_decay)
with tf.variable_scope('transform_XYZ') as sc:
assert(K==3)
weights = tf.get_variable('weights', [256, 3*K],
initializer=tf.constant_initializer(0.0),
dtype=tf.float32)
biases = tf.get_variable('biases', [3*K],
initializer=tf.constant_initializer(0.0),
dtype=tf.float32)
biases += tf.constant([1,0,0,0,1,0,0,0,1], dtype=tf.float32)
transform = tf.matmul(net, weights)
transform = tf.nn.bias_add(transform, biases)
transform = tf.reshape(transform, [batch_size, 3, K])
return transform实际上,前半部分就是通过卷积和max_pooling对batch内各个点云提取global feature,再将global feature降到 3×K 维度,并reshape成 3×3 ,得到transform matrix
通过数据增强丰富训练数据集,网络确实应该学习到有效的transform matrix,用来实现transformation invariance
loss:
监督分类任务中常用的交叉熵loss + alignment network中的mat_diff_loss
对于特征空间的alignment network,由于特征空间维度比较高,因此直接生成的alignment matrix会维度特别大,不好优化,因此这里需要加个loss约束一下。
总结:
PointNet之所以影响力巨大,并不仅仅是因为它是第一篇,更重要的是它的网络很简洁(简洁中蕴含了大量的工作来探寻出简洁这条路)却非常的work,这也就使得它能够成为一个工具,一个为点云表征的encoder工具,应用到更广阔的点云处理任务中。
MLP+max pooling竟然就击败了众多SOTA,令人惊讶。另外PointNet在众多细节设计也都进行了理论分析和消融实验验证,保证了严谨性,这也为PointNet后面能够大规模被应用提供了支持。